Я видел в сети много самодельных лазерных граверов и инструкций по их сборке, и захотел собрать свою собственную версию.
После многочисленных попыток, у меня получился лазерный гравер на Ардуино своими руками, надежный и приятный в использовании.
Максимальная мощность – 3 Вт, но обычно я работаю на 2 Вт, чтобы поберечь лазерный диод. Честно говоря, разница между 2 и 3 Вт практически не заметна.
Содержание статьи
Лазерный модуль с проводами и стеклянной линзой
В этой статье я покажу, что можно собрать, обходясь минимумом материалов и практически не тратясь.
Думаю, вы уже знакомы с GRBL (программа открытого проекта для Arduino, предназначенная для фрезерных — граверных станков и лазерных станков), с редактором Inkscape и с тем, как создавать файлы Gcode.
Я не буду подробно расписывать электронику, в этой статье не будет всеобъемлющей информации, возможно, в будущем я раскрою какие-то моменты более подробно — я вполне допускаю, что дал недостаточно информации, чтобы собрать гравировщик ЧПУ легко с первого раза.
Я добавляю:
- STL-файлы, готовые для распечатки
- GRBL-программу для моей конфигурации
- плагин лазерного гравировщика, который я использую для Inkscape
- файл с подсчетом стоимости деталей. Почти все их можно заказать на Aliexpress
- файлы EAGLE для создания модуля с мосфет-диодом для индикации включения-выключения гравировщика
Для печати плат рекомендую сервис OSH Park.
Файлы
- cable_through.stl
- Carriage Idler.stl
- Carriage Laser.stl
- Carriage Motor.STL.stl
- Fan Holder.stl
- Idler Puller Holder.stl
- Laser Holder.stl
- NEMA 14 mount.stl
- Xtensionner_part1.stl
- Xtensionner_part2.stl
- YBeltHolder.stl
- YTensionner.stl
- grbl.zip
- laserengraver_smoothie.zip
- BOM Instructable.ods
- Adaptateur MOSFET GRID eagle.zip
Шаг 1

Берем два линейных вала и четыре суппорта для них.
Шаг 2

- Закрепляем валы в двух суппортах
- Берем четыре закрытых линейных подшипника в корпусе
Шаг 3
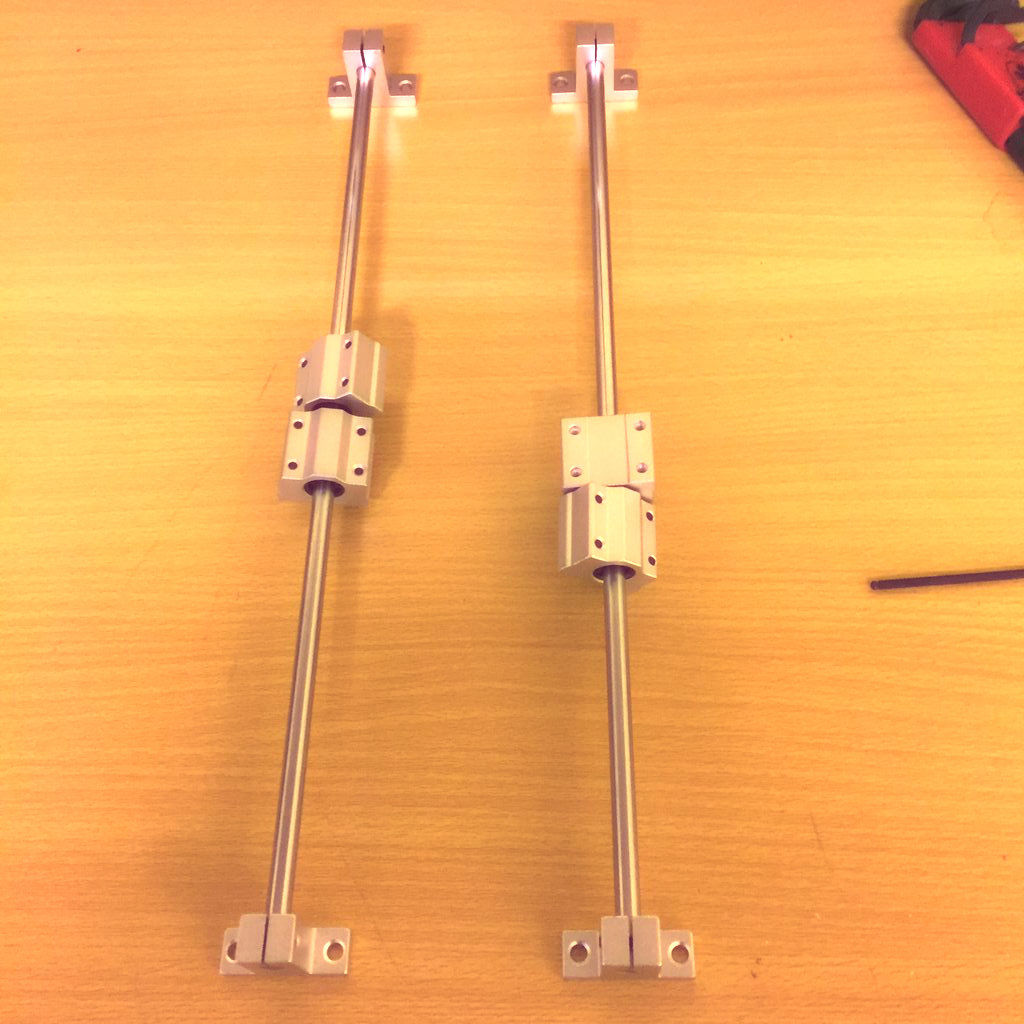
Надеваем на валы по два подшипника и закрепляем валы в оставшихся двух суппортах
Шаг 4
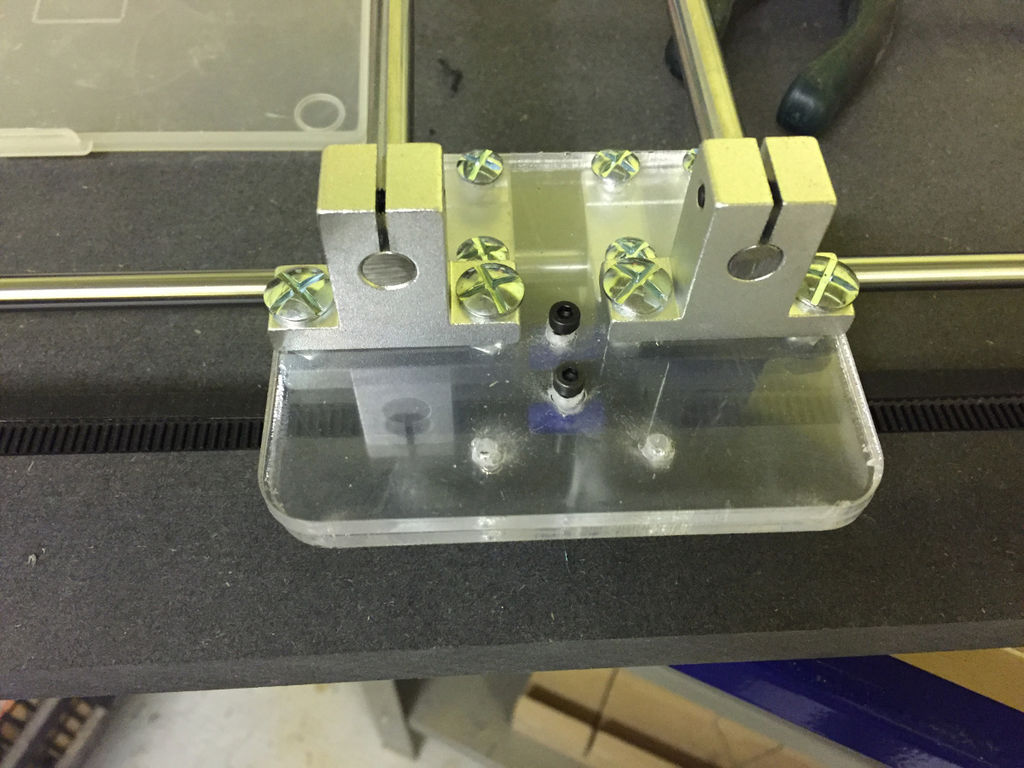
Подготавливаем пластины для лазерного резака (держатели каретки).
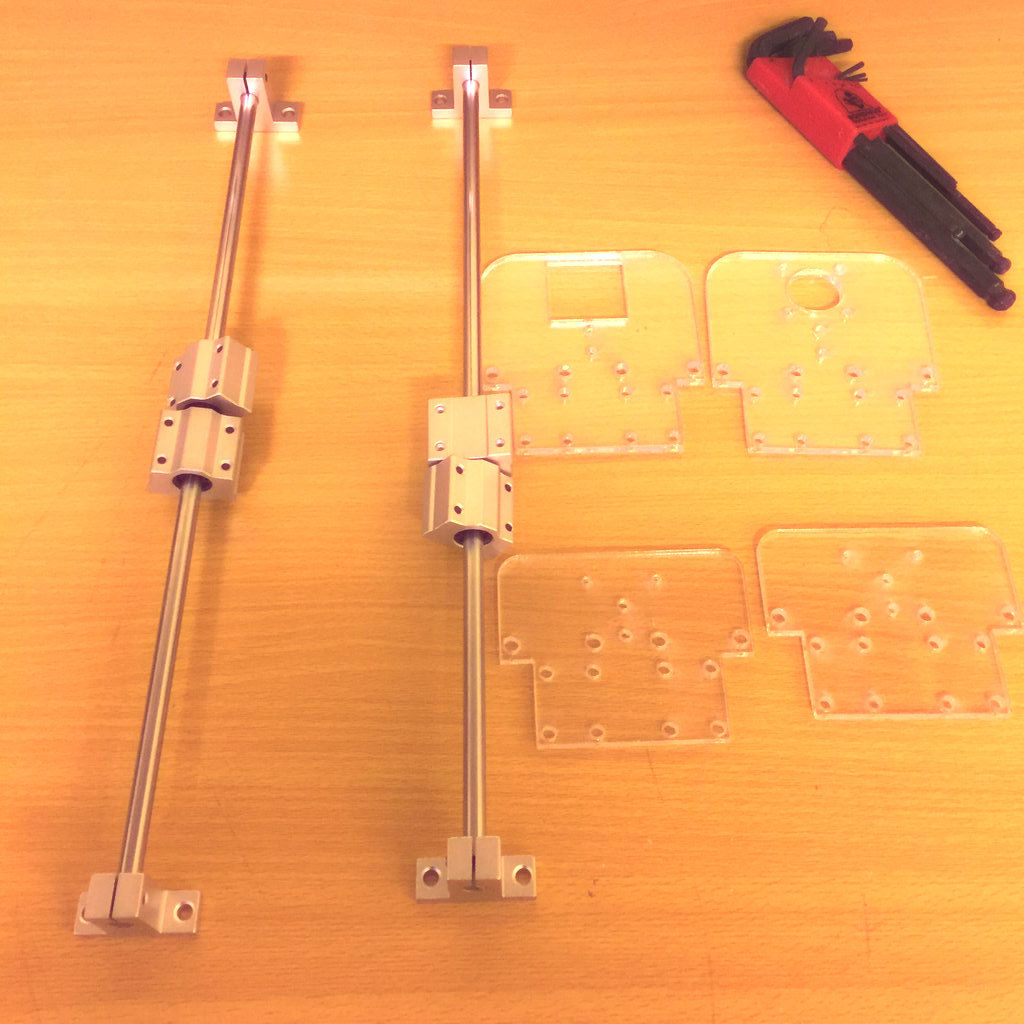
Шаг 5
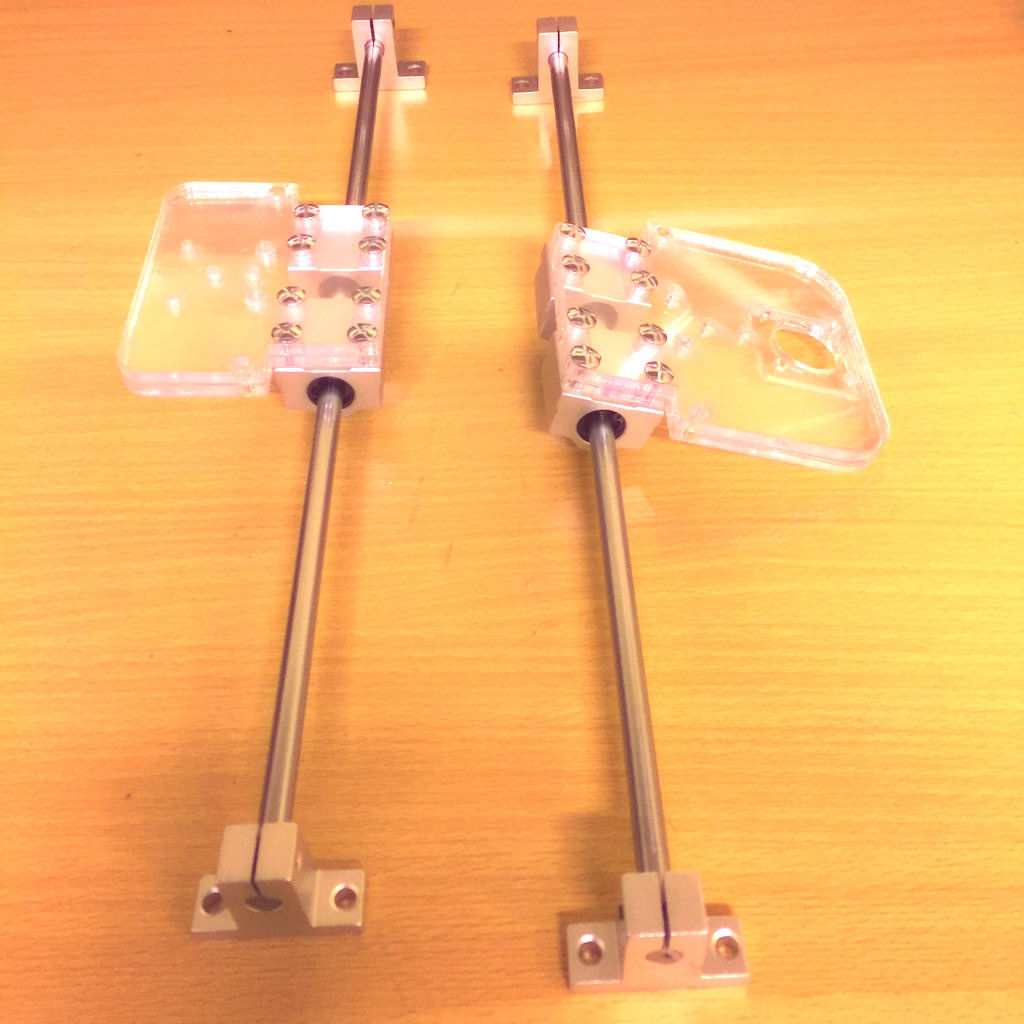
Закрепляем пластины на подшипники.
Используем винты М4 16мм.
Шаг 6
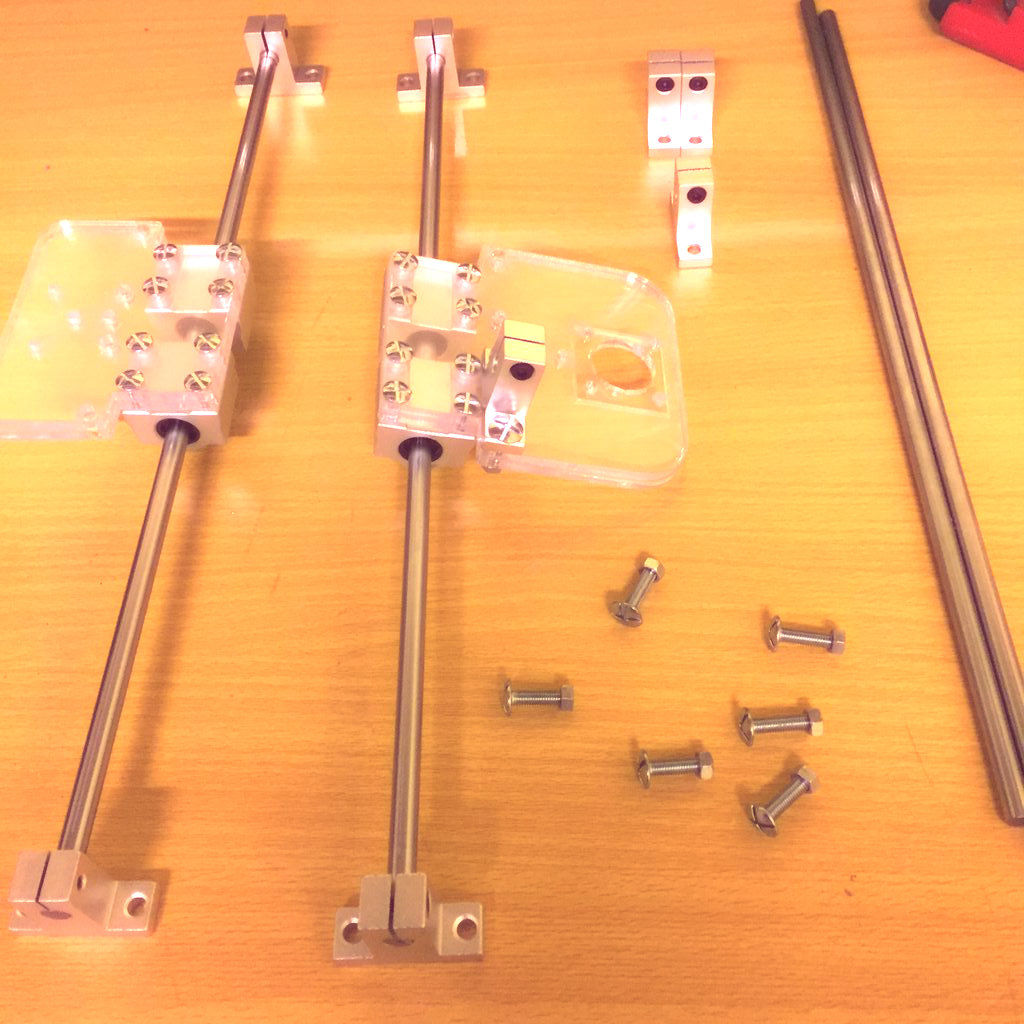

Берем еще два линейных вала, суппорты к ним, винты М5 20 мм с гайками.
Монтируем суппорты на держатели каретки.
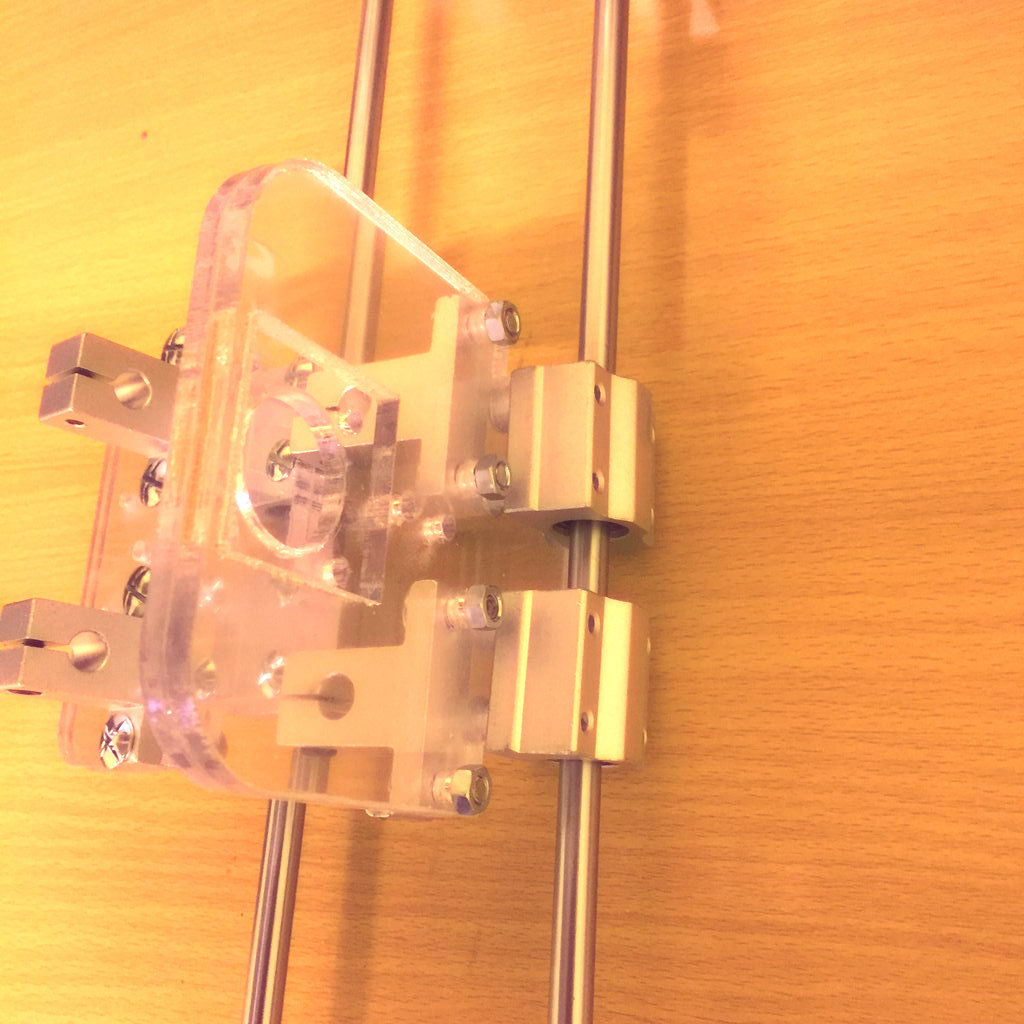
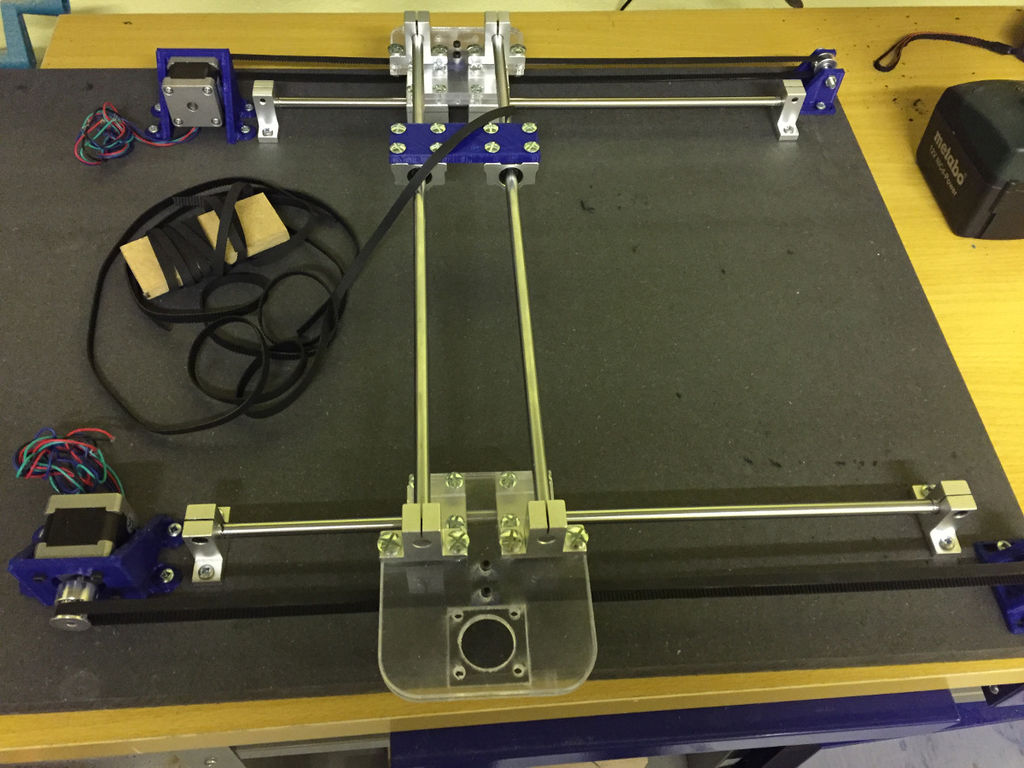
Шаг 7
Монтируем линейные валы в суппорты на держателях, это ось Х, и проверяем ход подшипников по нижним валам, это ось Y.
Подготовьте два закрытых подшипника, 8 винтов М4 16 мм и каретку, напечатанную на 3Д принтере.
Разберите ось Х, наденьте на линейные валы подшипники и каретку, и закрепите суппорты снова.
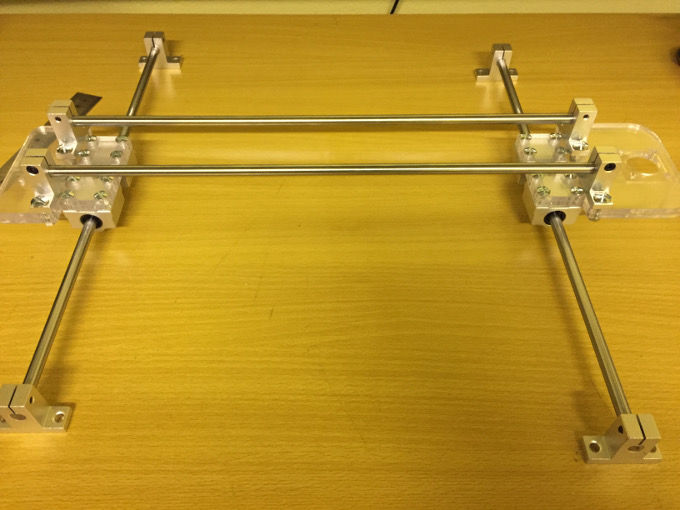
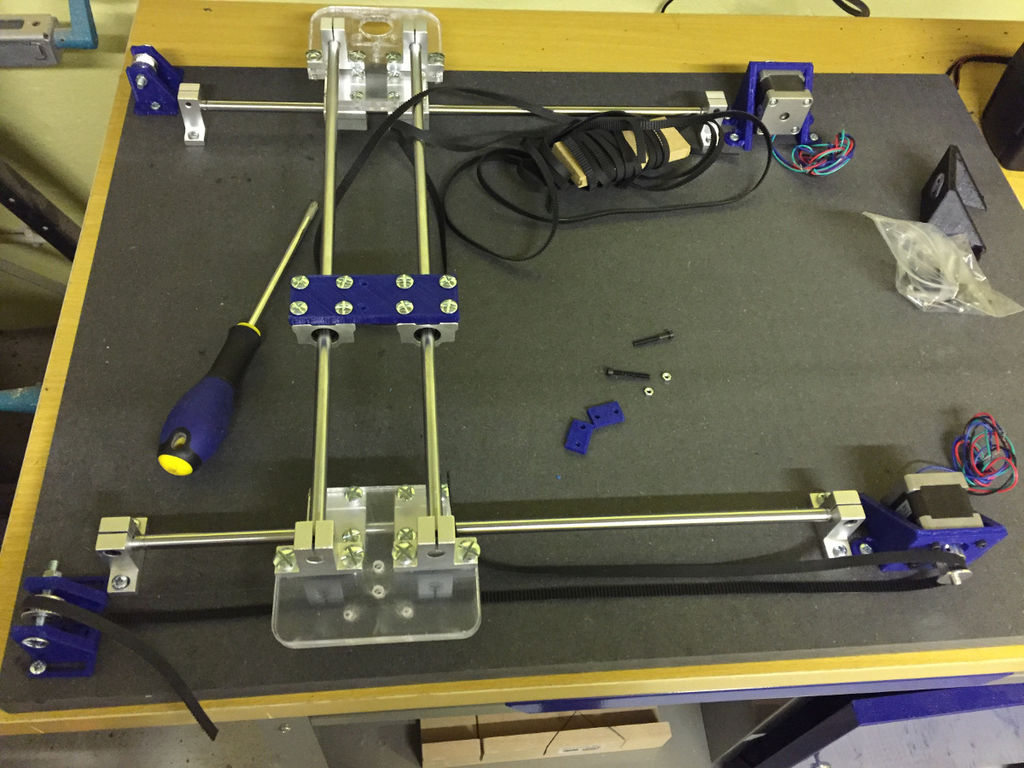
Шаг 8
Теперь монтируем конструкцию на деревянную плиту. Движения должны быть точными и уверенными.
К этому этапу, к сожалению, не сделано фотографий.
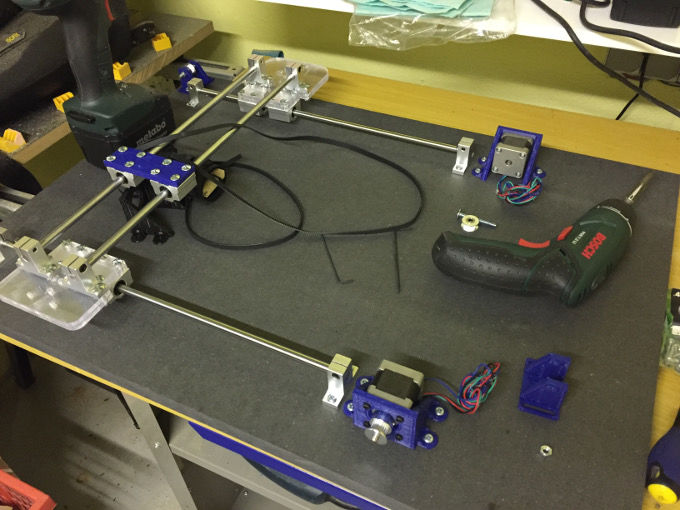
Шаг 9
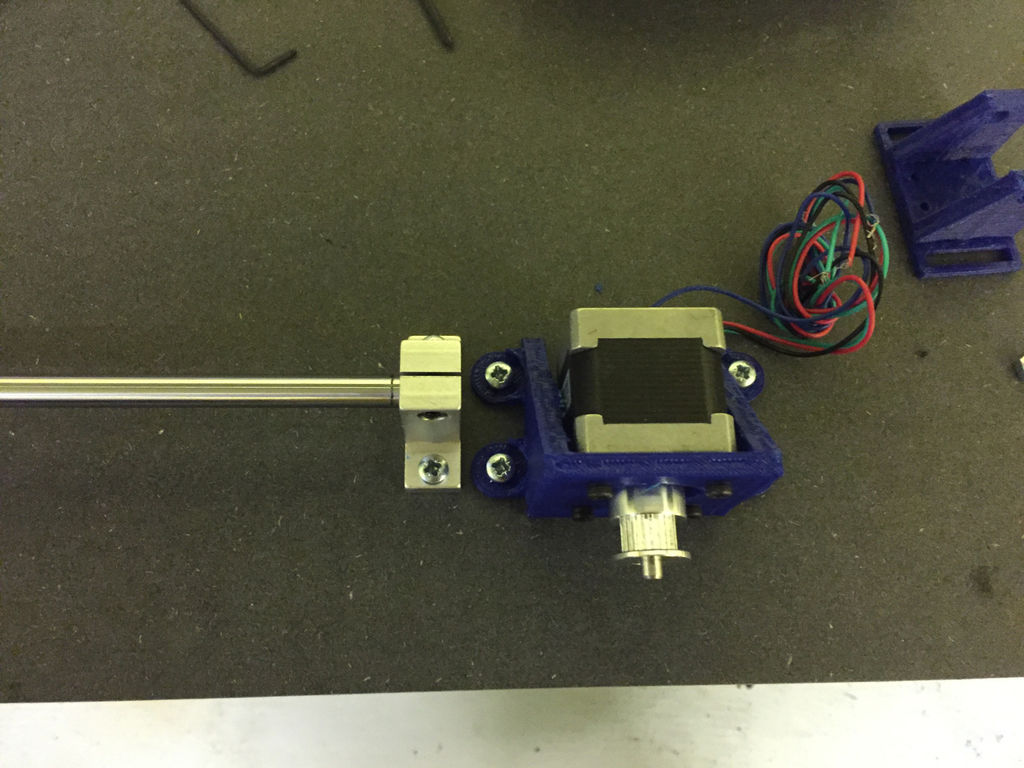
Закрепляем два электродвигателя на оси Y креплениями, напечатанными на 3Д-принтере.
Для этого используйте винты М3 10мм.
Закрутите винты, убедившись, что они выставлены ровно.
Шаг 10
Ременная передача оси Y

Соберите натяжные механизмы и привинтите их на платформу (для этого возьмите винты 5 мм с гайками).
Шаг 11
Подготовьте крепления ремней и винты М3 25 мм.
Закрепляя ремни на оси Y будьте терпеливы, это достаточно сложная работа.
Шаг 12
Устанавливаем двигатель на ось Х
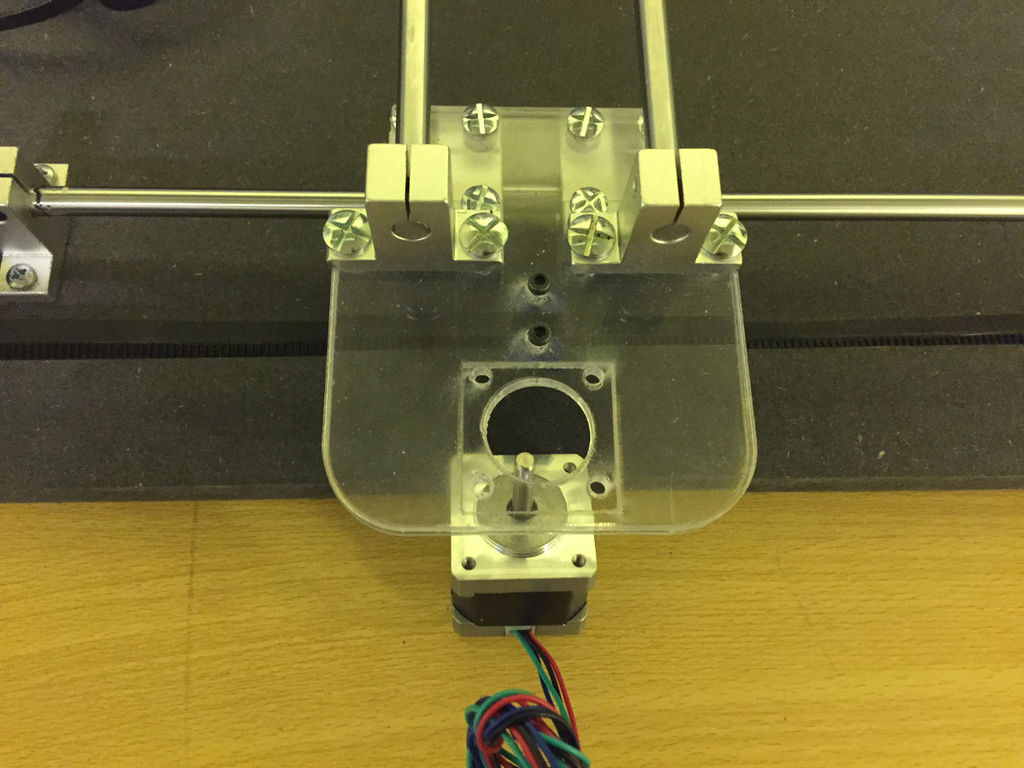
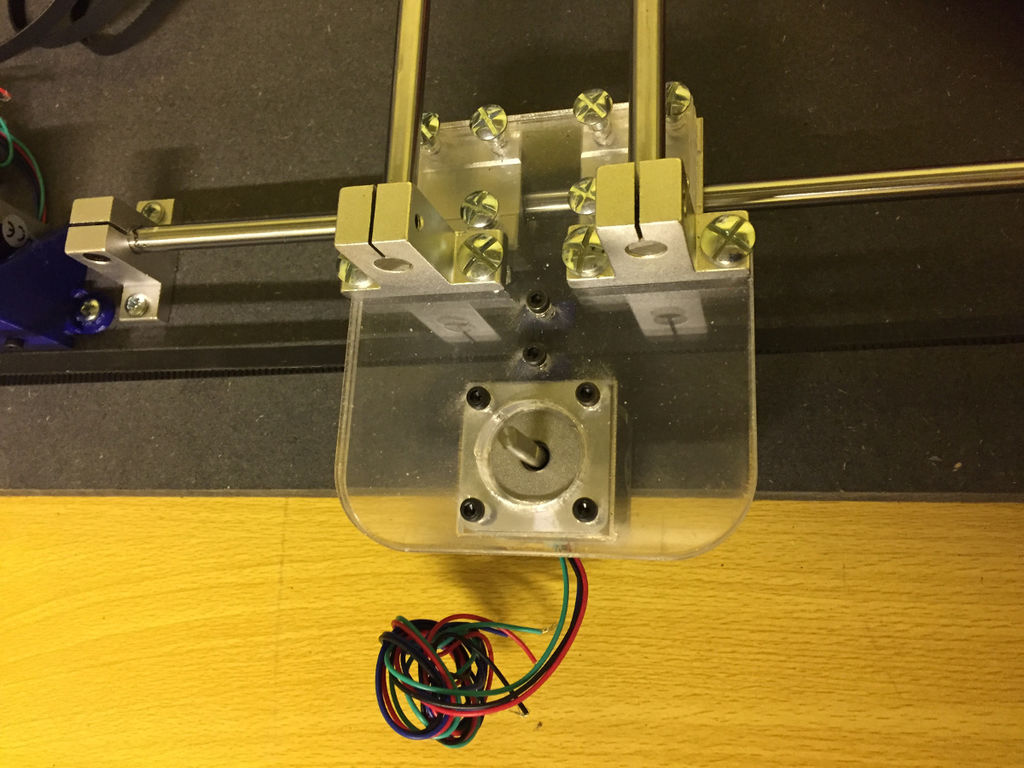
Вообще, это можно было сделать и раньше.
В нашем случае делаем следующее:
- немного раскрутите винты, чтобы приподнять каретку
- под кареткой установите двигатель
- привинтите его винтами М3
Шаг 13
Ременная передача на оси Х
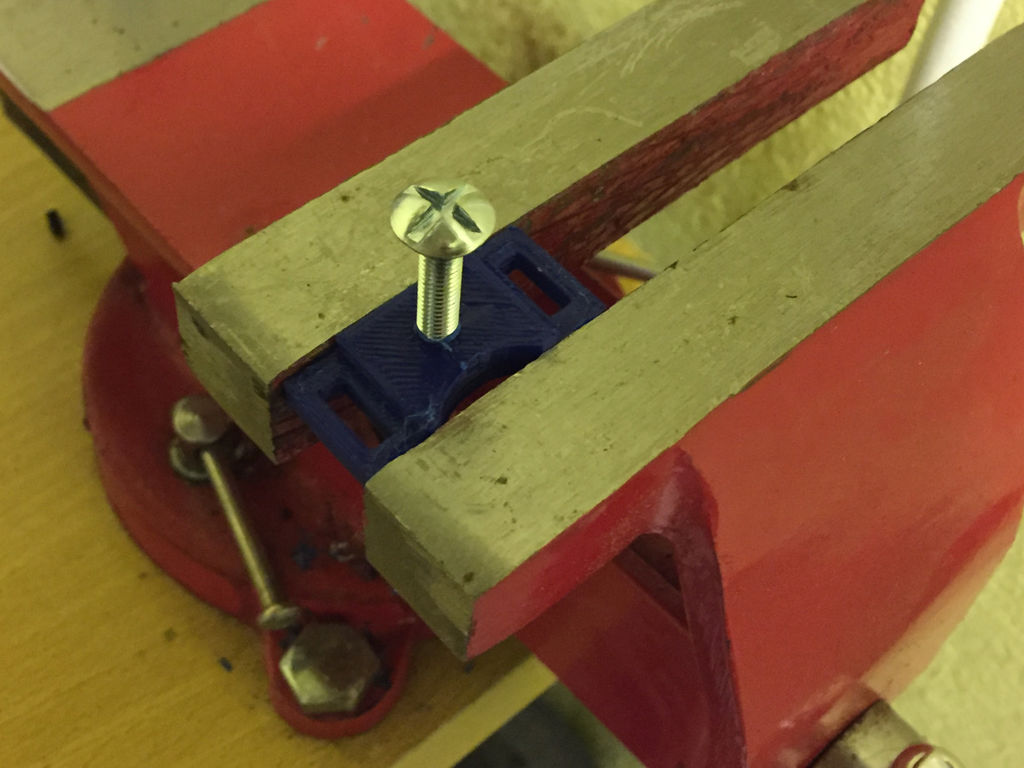
В отверстие детали, напечатанной на 3Д-принтере, вставьте винт М4, пластик достаточно мягкий для этого.
Наденьте шкив на винт М4 и закрепите натяжной механизм на приборе.
К этому этапу снова не сделано фотографий.
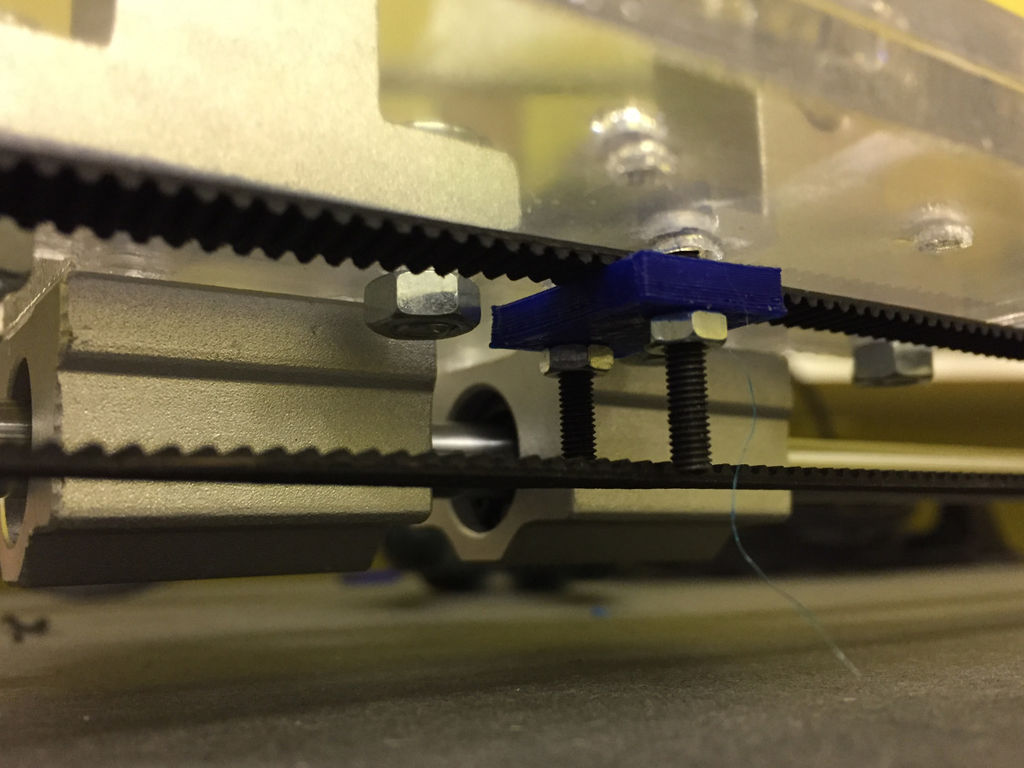
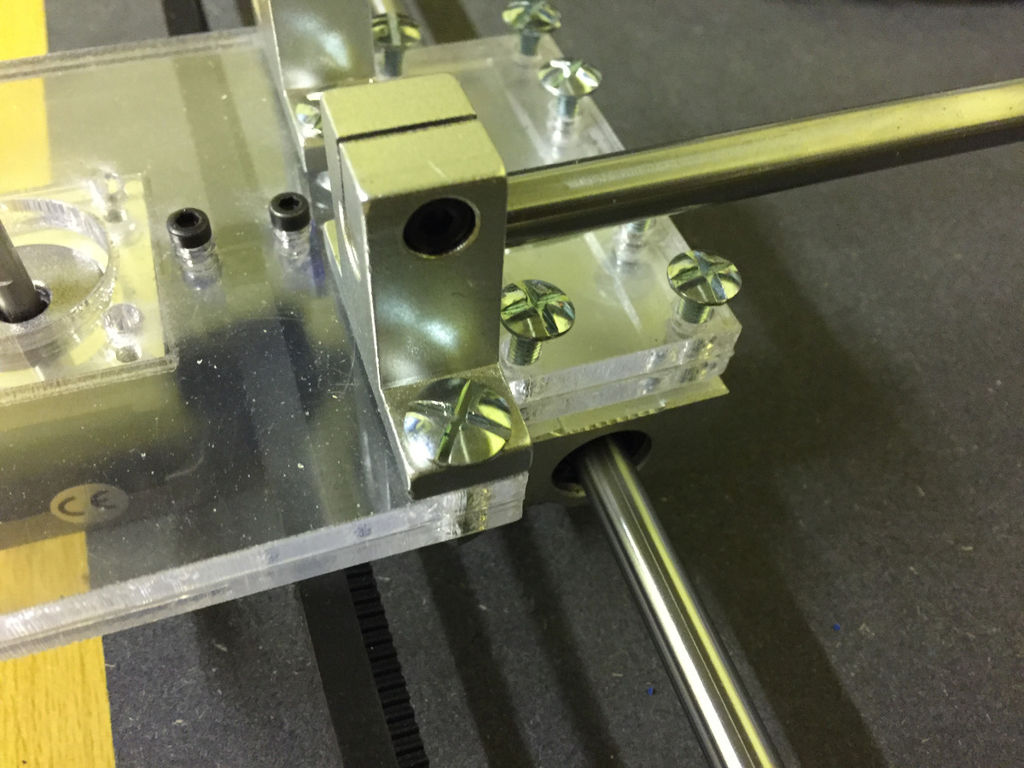
Шаг 14
Держатели ремня на оси Х



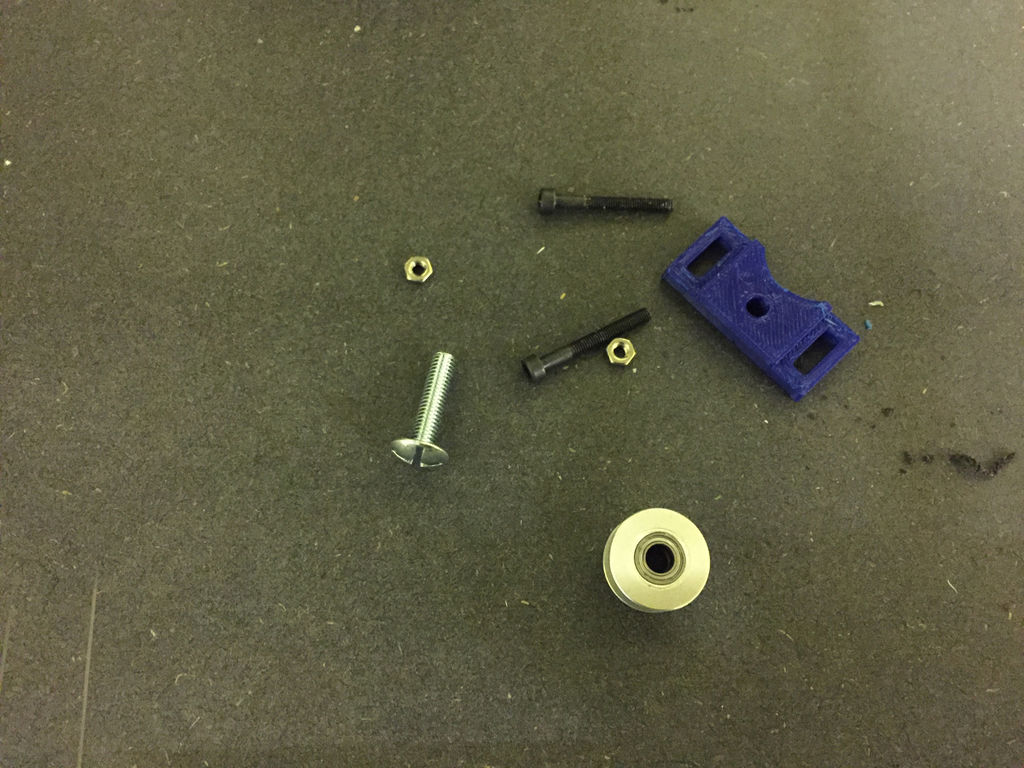
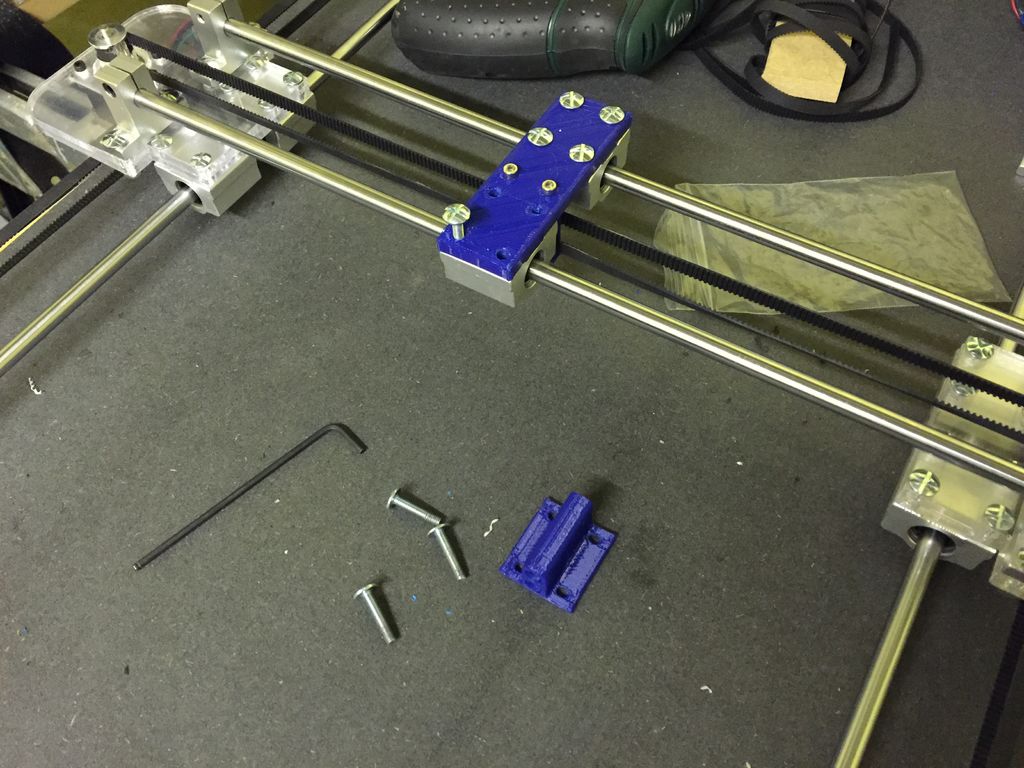
- Подготовьте составные части для держателя ремня.
- Вставьте винты М3 в отверстия деталей, как показано на картинке.
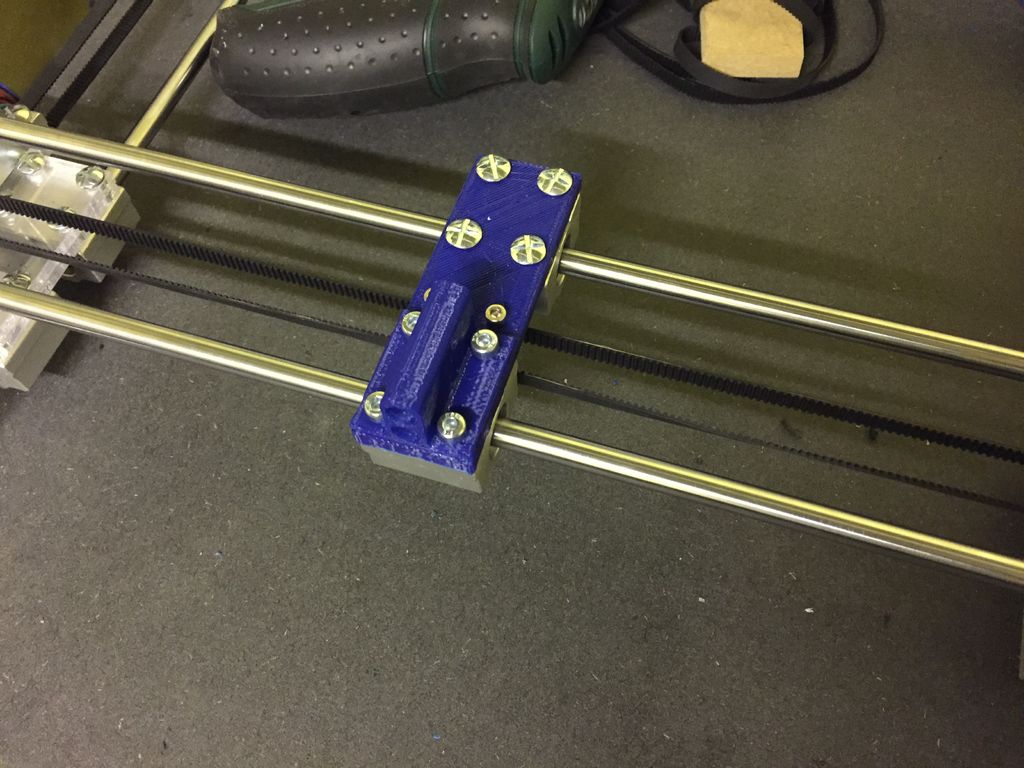
- В оставшиеся 2 отверстия также вставьте винты (фото следующего шага).
- Установите держатели ремней на место.
Шаг 15


Шаг 16
Держатель шнура

Установите держатель шнура.
Шаг 17
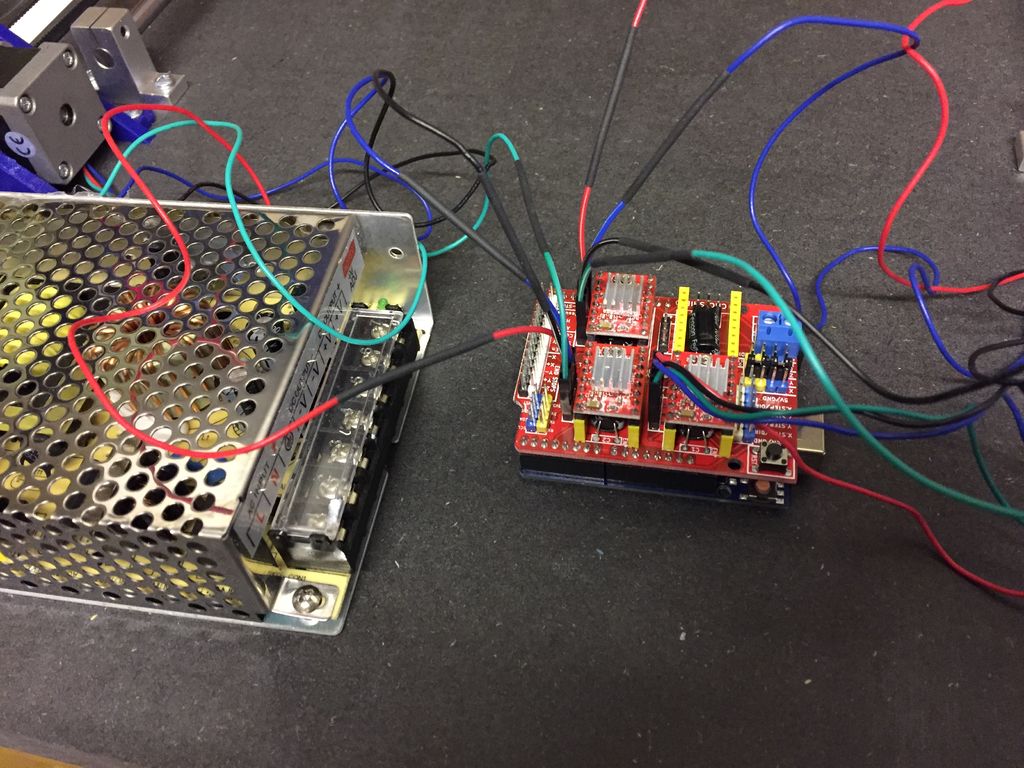
Электроника
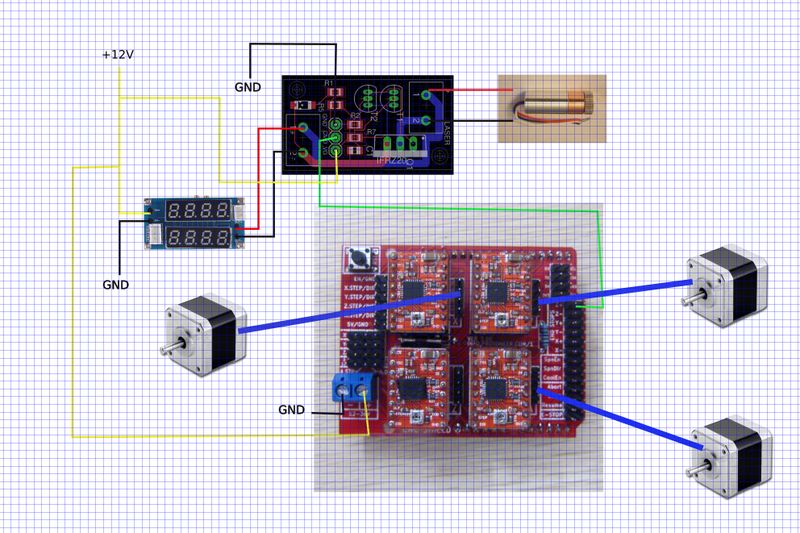
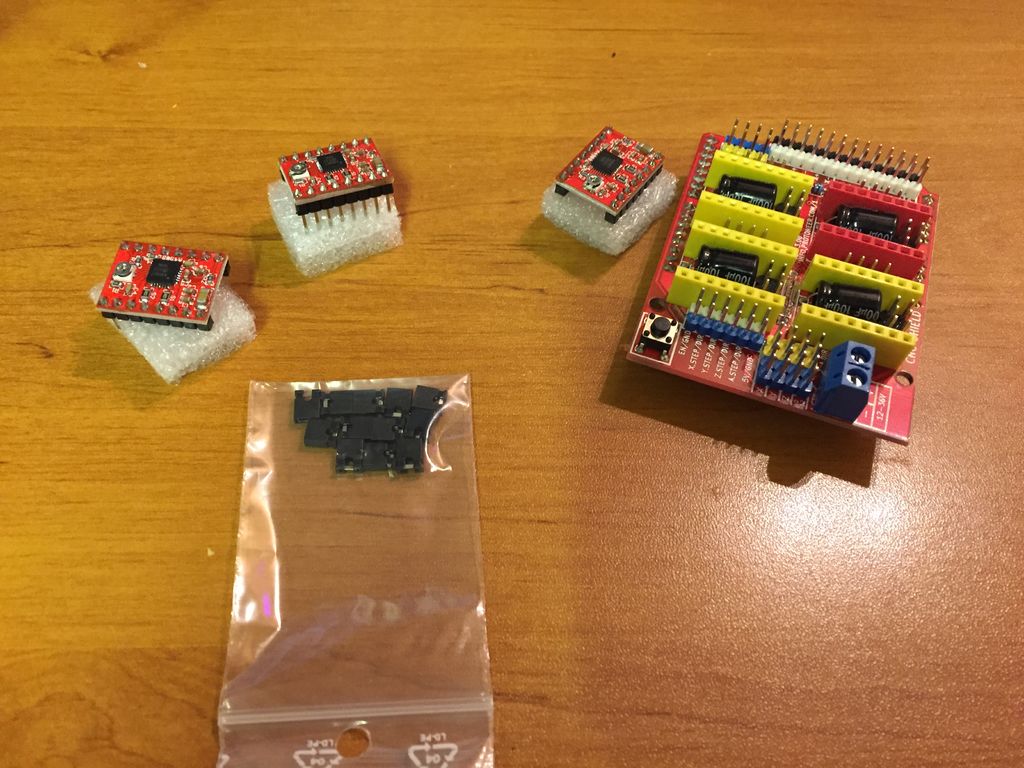
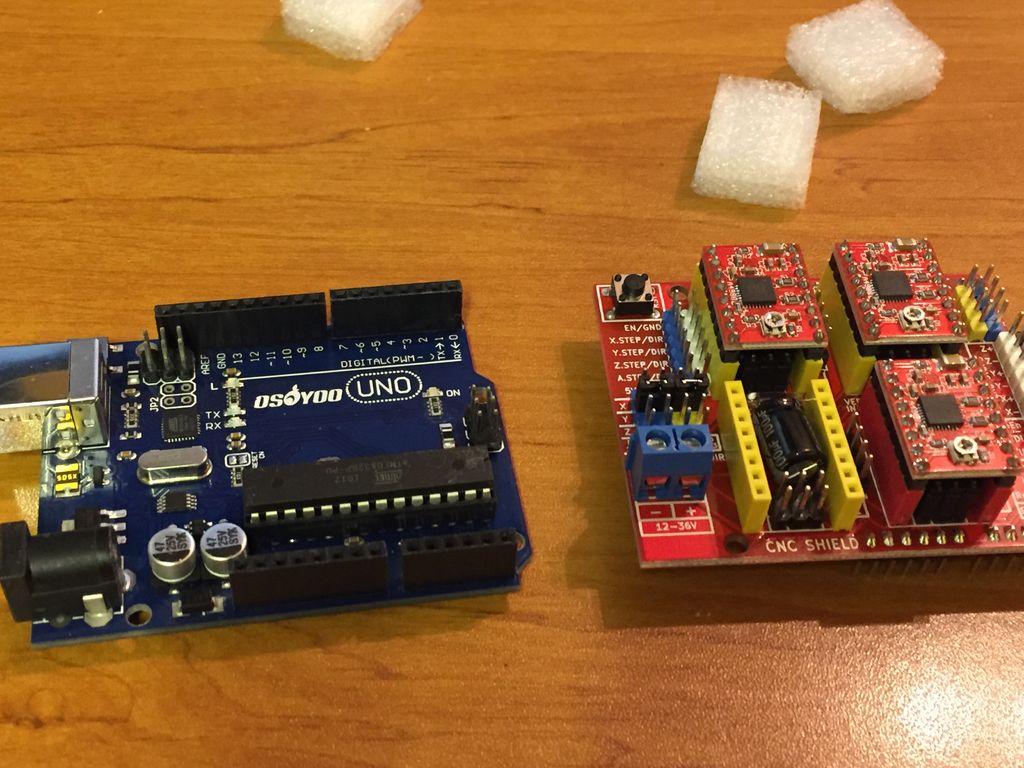
Подготовьте:
- 3 привода электродвигателя
- шилд CNC
- 11 перемычек (обычно идут в комплекте с шилдом)
- Плата Arduino
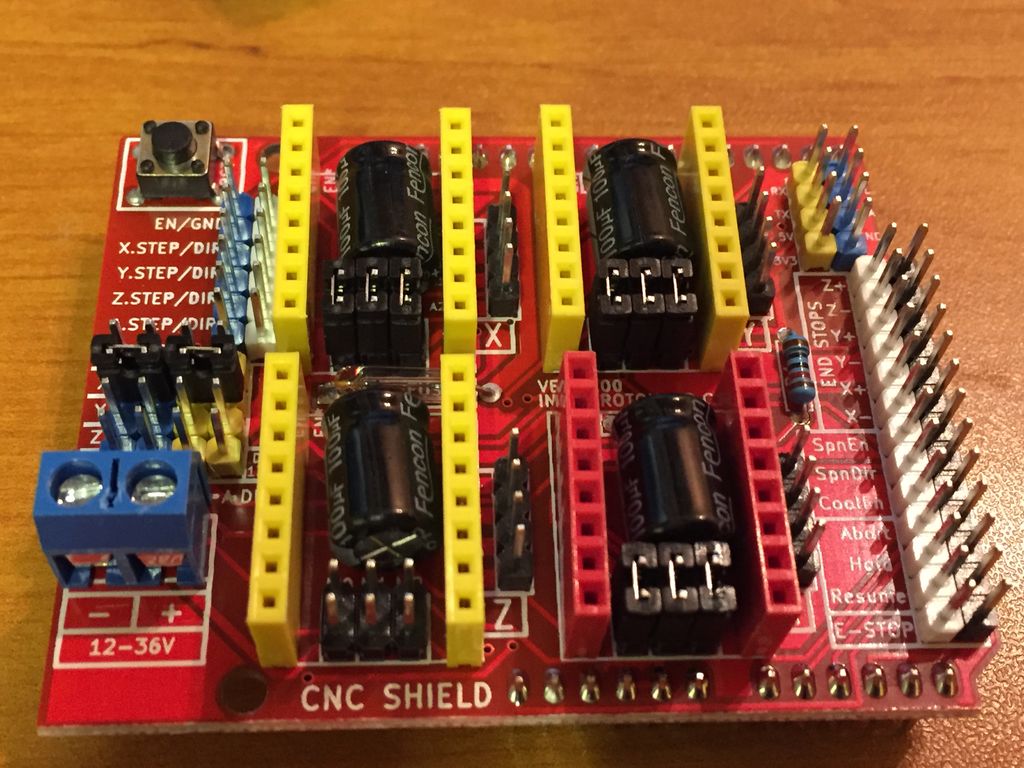
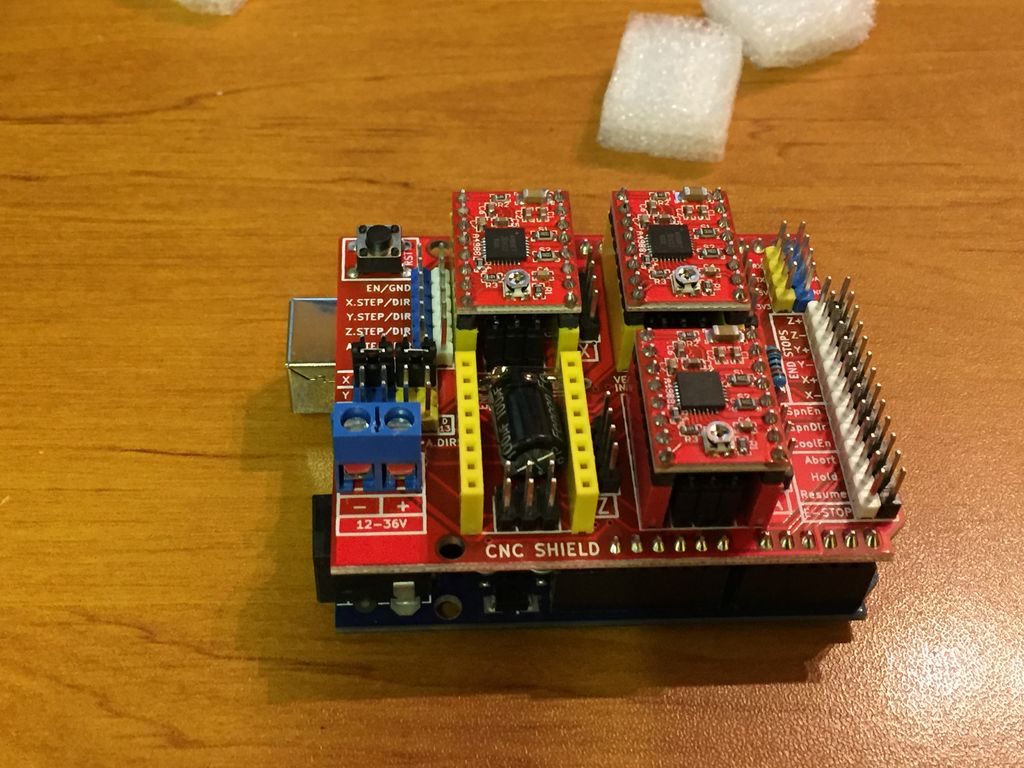
Затем:
- установите перемычки так, как это показано на фотографии 2. Это позволит установить двигатели на микрошаг 16 и клонировать ось Y на А.
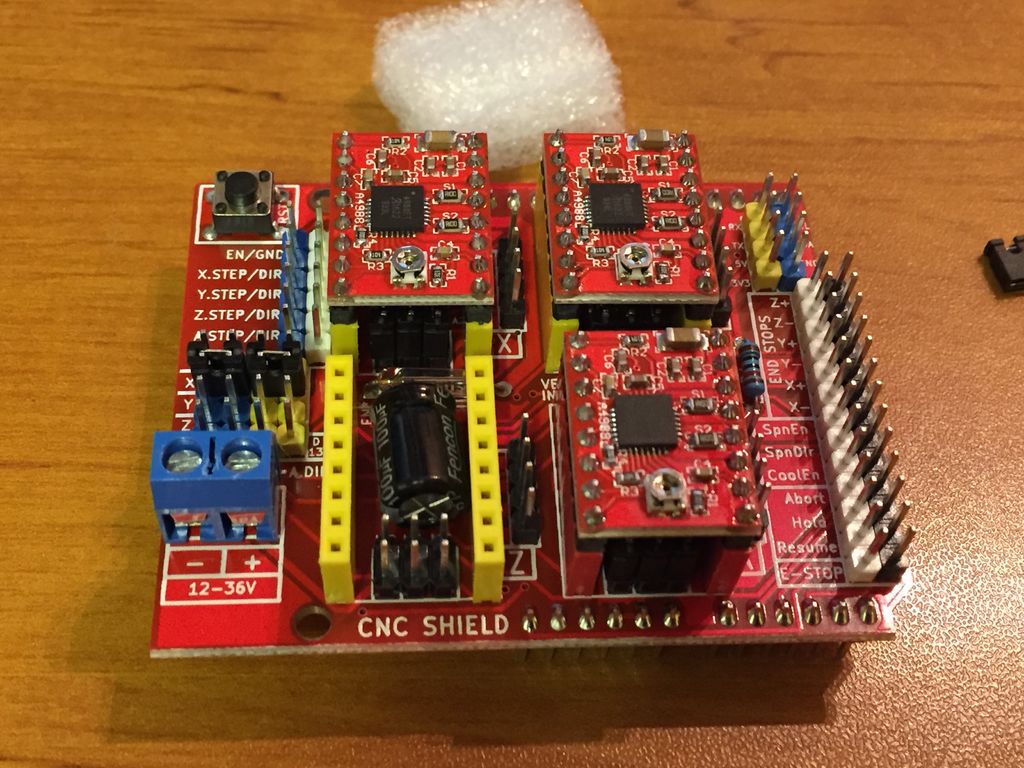
- подключите приводы к плате Arduino.
Шаг 18
Электроника: теплоотвод шагового двигателя
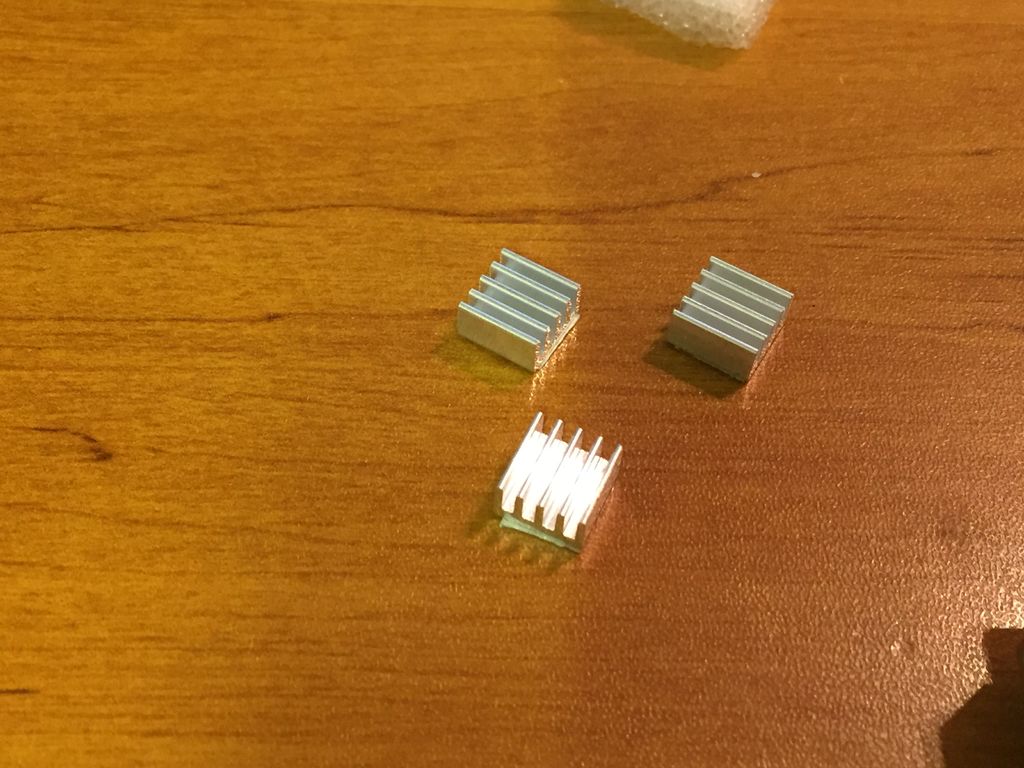
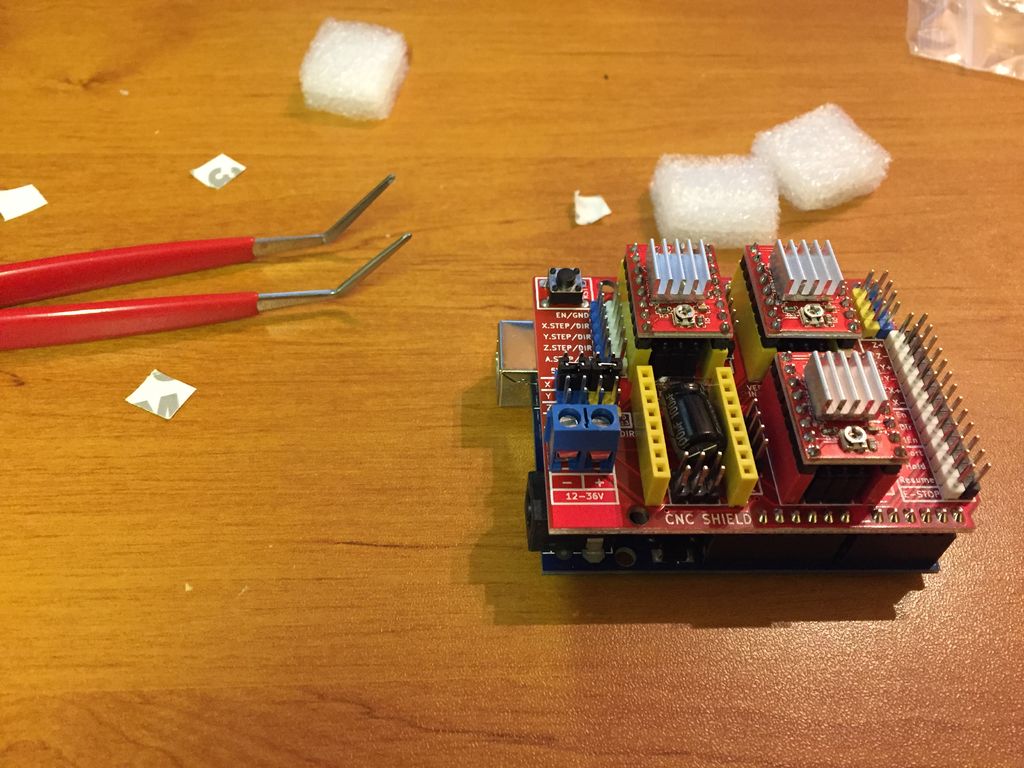
Вам нужен радиатор, без него двигатель будет пропускать шаги.
Шаг 19
Электроника: паяем коннекторы к проводам двигателей
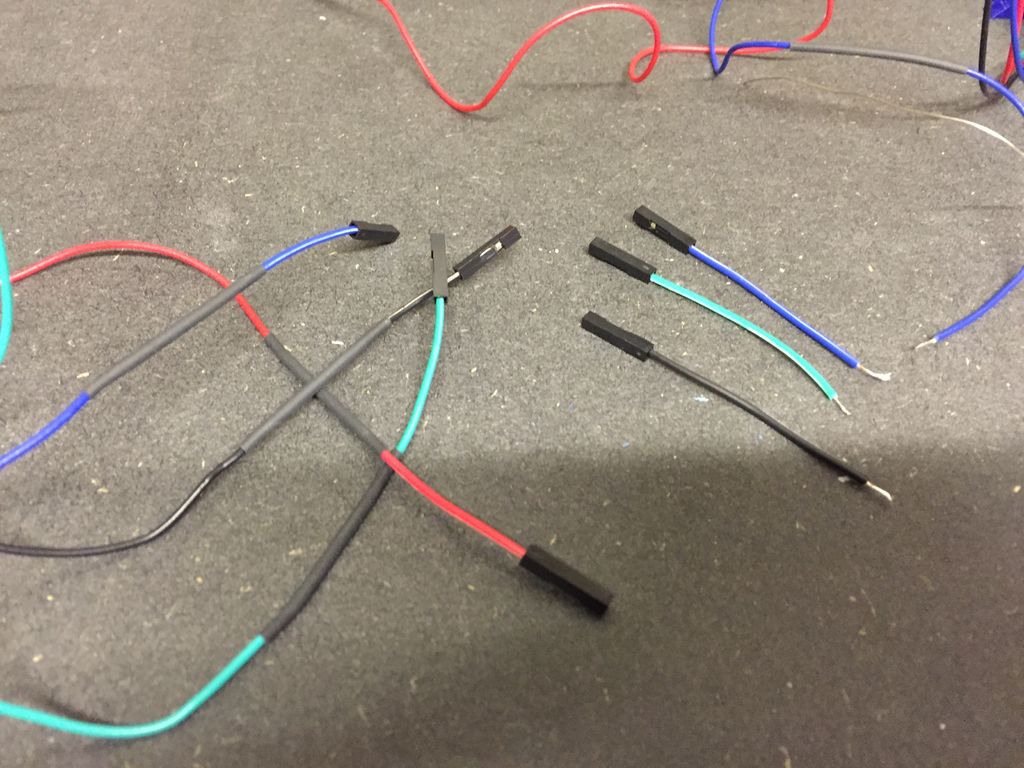
Можно купить готовые коннекторы и соединить двигатели с шилдом CNC, но нужно будет ждать доставку и это не так просто.
Я предпочитаю купить готовые коннекторы мама-мама, разрезать их на две части и спаять с шилдом…
Шаг 20
Электроника: пробный запуск
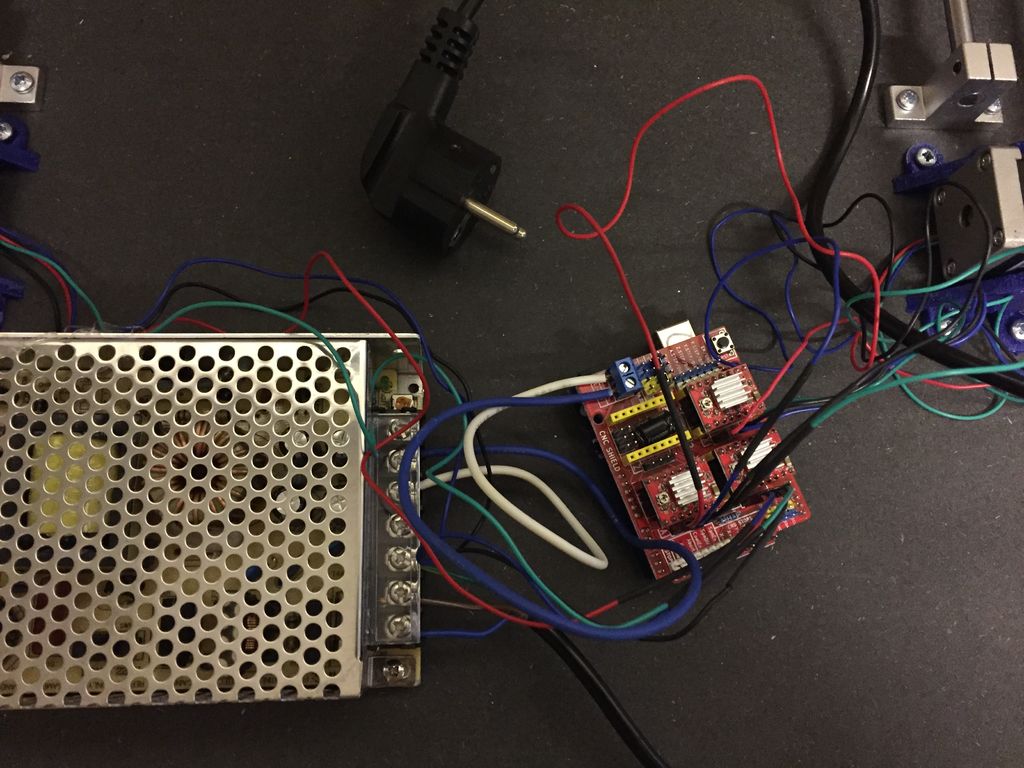
Пришло время провести испытание:
- подключите двигатели к шилду CNC
- включите питание
- загрузите GRBL на Arduino и заставьте механизм двигаться
Если механизм работает, пора приступать к следующему шагу.
Шаг 21
Устанавливаем крепление лазера
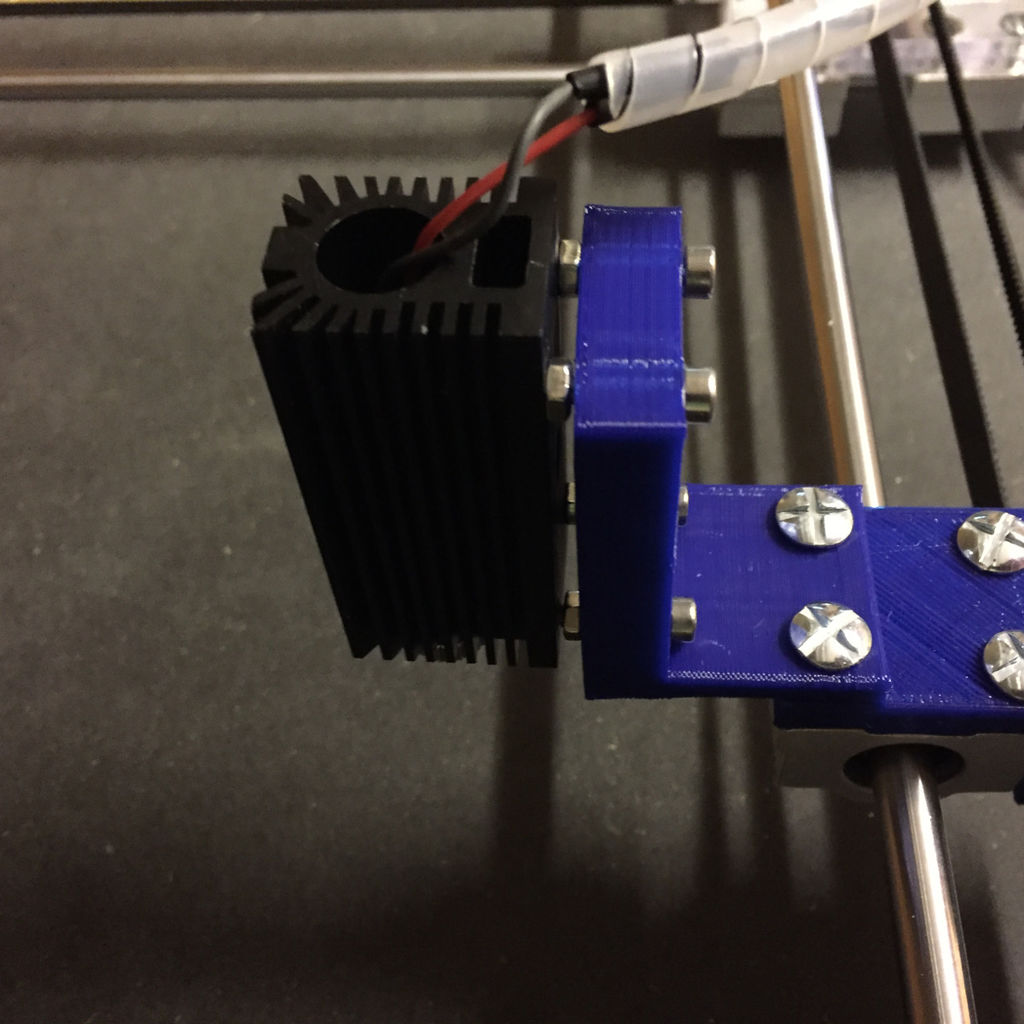
Подготовьте:
- напечатанное на 3Д-принтере крепление для лазера
- 4 винта М3 с гайками
- радиатор
- лазерный модуль
Радиатор не должен соприкасаться с креплением лазера, так как оно пластиковое, а радиатор сильно нагревается.
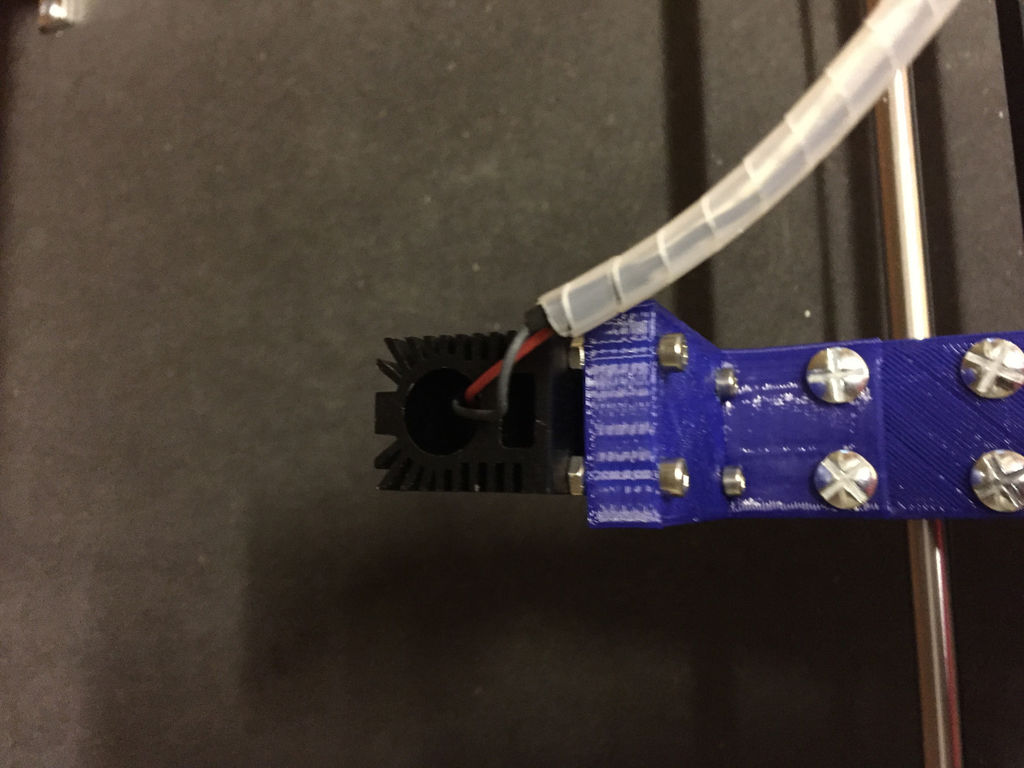
Шаг 22
Устанавливаем крепление вентилятора
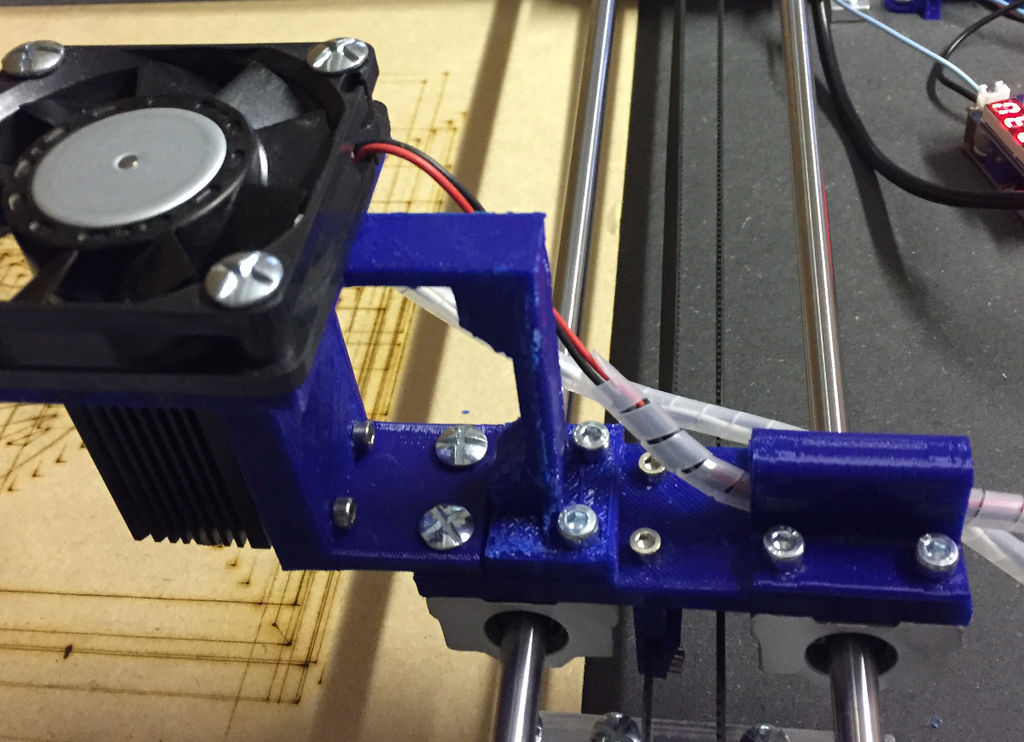
Подготовьте:
- напечатанное на 3Д-принтере крепление вентилятора
- 4 винта М4
- вентилятор
Теперь сделайте следующее:
- просверлите 4 отверстия в креплении
- вставьте винты в отверстия
- закрепите вентилятор
Шаг 23
Собранный прибор
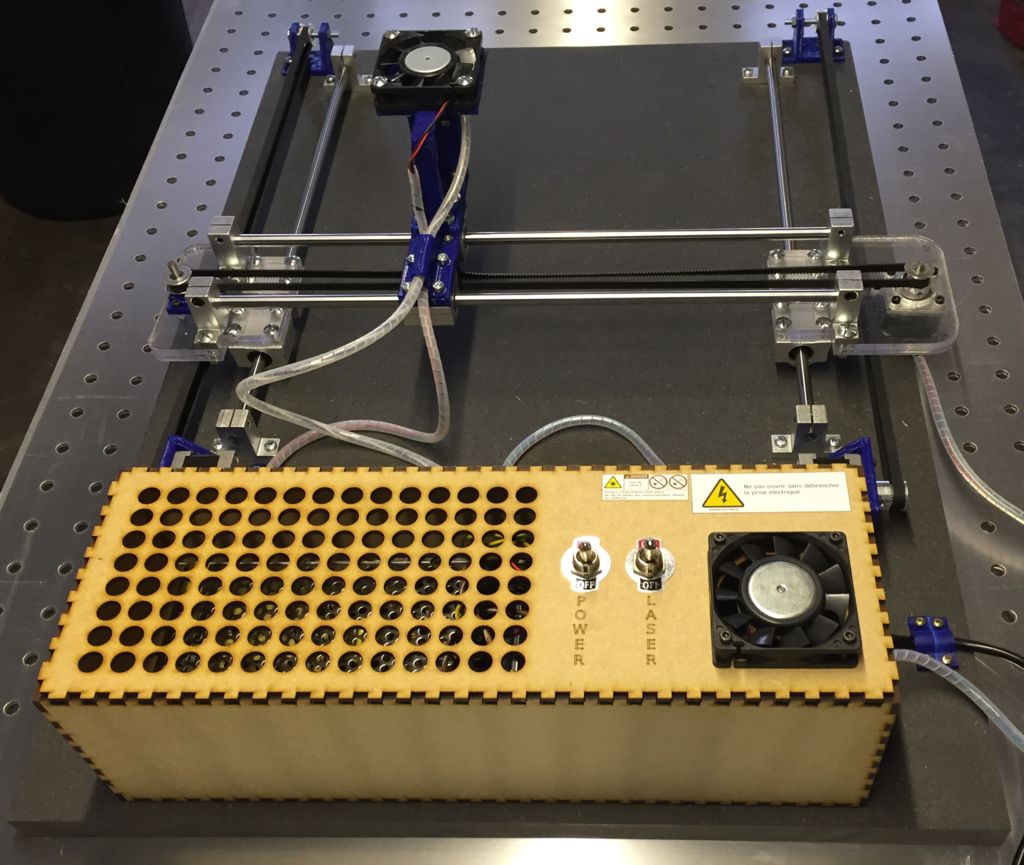
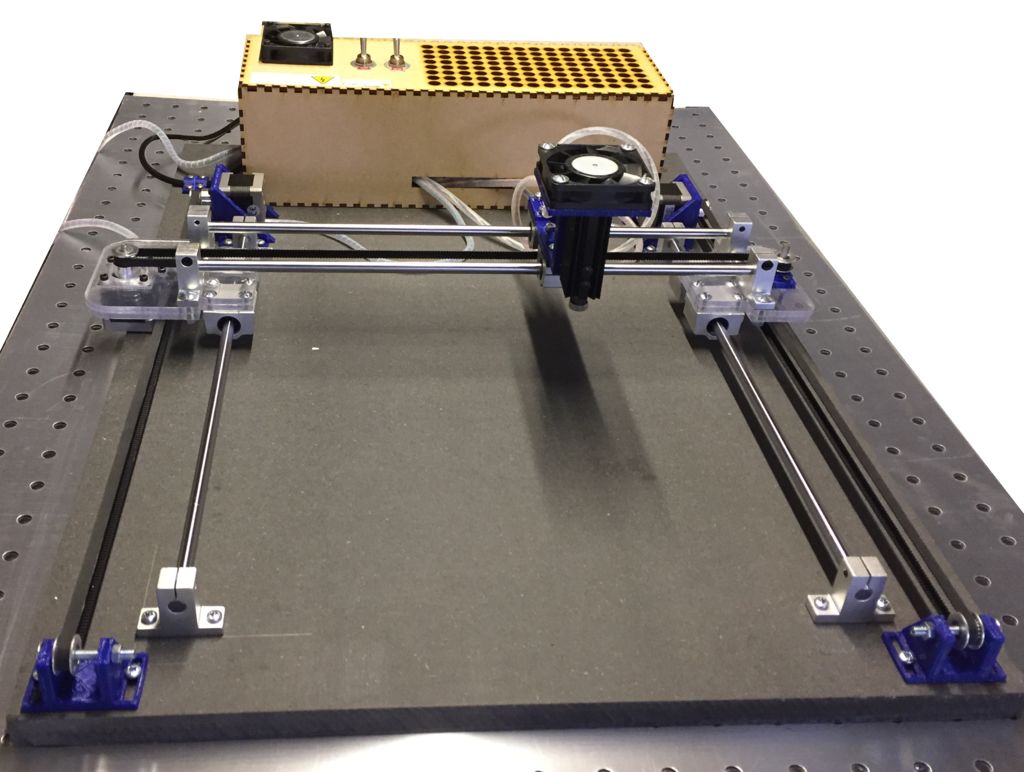
Корпус с прорезями, сделанными лазером, я сделал с помощью он-лайн программы MakerCase.
Шаг 24
Образцы




Шаг 25
Дорабатываем вентилятор
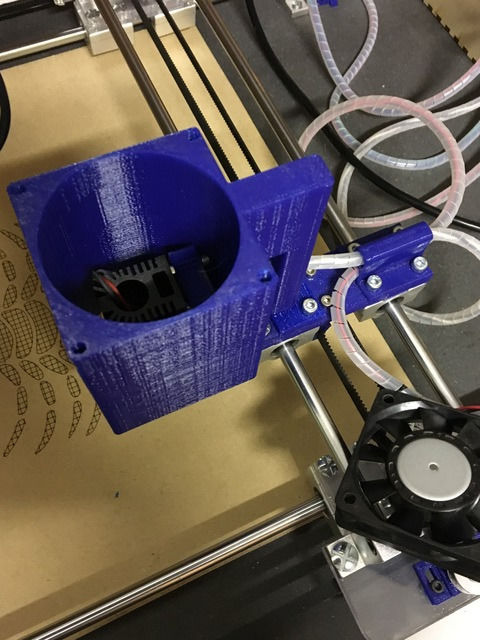
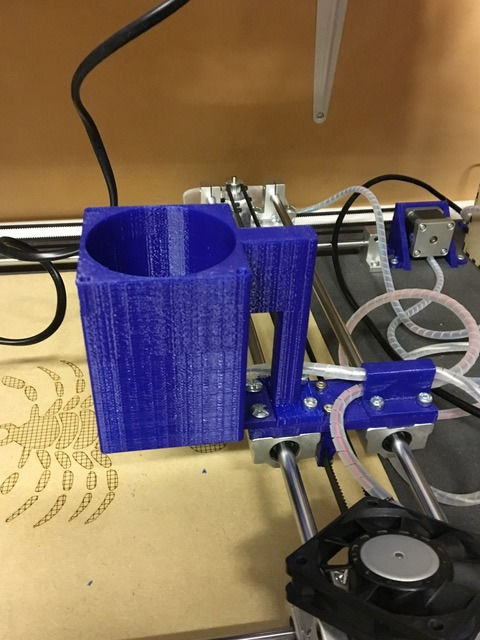

Я доработал крепление вентилятора для лучшего охлаждения, файл STL приложен. Просто напечатайте крепление на 3Д-принтере и замените им старое крепление.
Файлы
Шаг 26
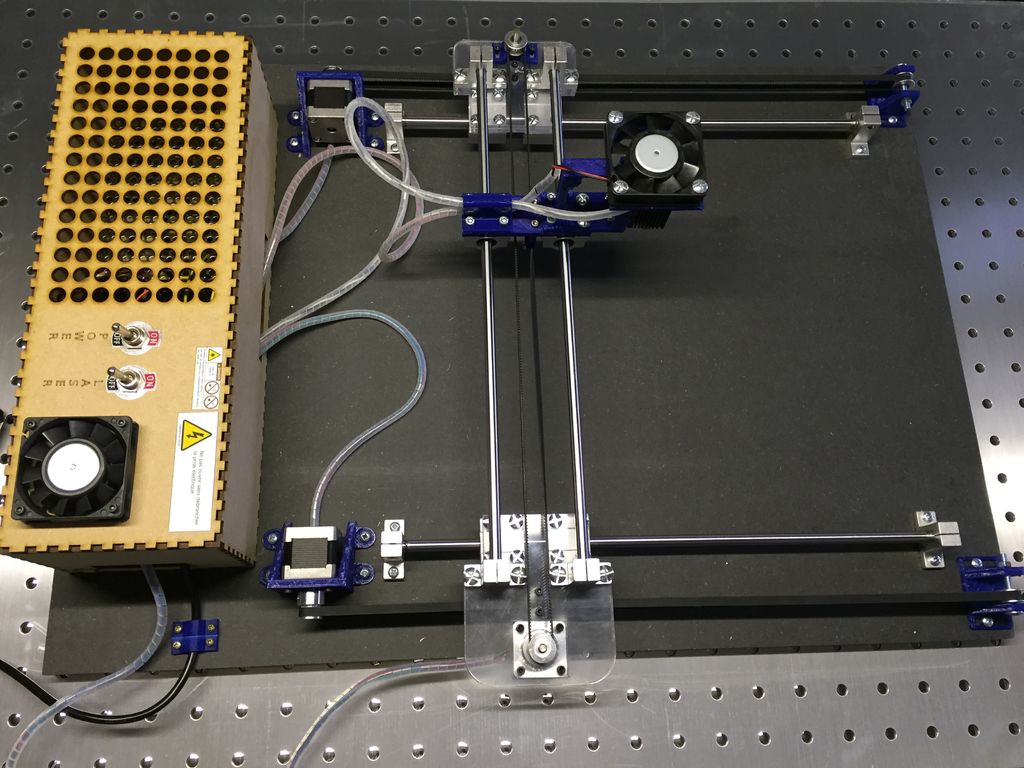
Доработка гравировщика
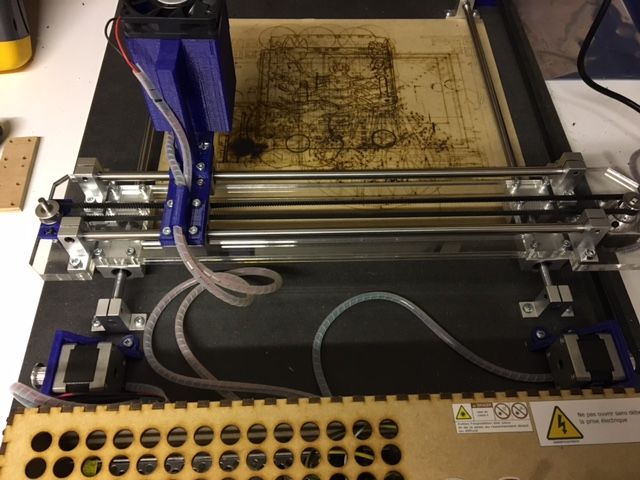
Я усилил ось Y, чтобы увеличить точность на ней. Также я заметил, что ось Х получилась более точной, и не могу найти этому причину.
Усиление не очень работает, но после него для нормальной работы по оси Y хватает одного мотора, поэтому левый мотор я снял.
Новое испытание показало, что после изменений работа по оси Y стала такой же точной, как и по оси Х.
Рекомендую такую доработку.
Файлы





