Arduino – компания по производству комплектующих деталей и программного обеспечения для компьютеров, а еще сообщество пользователей, создающих интерактивные приборы на основе микроконтроллеров, которые могут с помощью сенсоров управлять объектами реального мира.
Эти системы представляют собой блоки цифровых и аналоговых входов/выходов, которые можно подключать к платам расширения для модуля контроллера («шилдам») или в другие схемы.
Эта инструкция расскажет как сделать машинку на радиоуправлении своими руками и поможет вам установить голосовое управление самоходной установкой через смартфон и Bluetooth-модуль HC-06.
Как это работает?
Вы уже видели приложение Rover Controller от Android? Его можно использовать для управления Arduino через Bluetooth. Приложение работает после сопряжения с вашим смартфоном через модуль Bluetooth, используются команды «Вверх», «Вниз», «Право» и «Лево». При нажатии команды на экране смартфона, приложение посылает сигналы на микроконтроллер Arduino по каналу Bluetooth.
Содержание статьи
Шаг 1: Компоненты

Если вы не можете найти что-то из этого списка в магазинах, можно заказать онлайн.
Список компонентов:
- Arduino UNO, аналогичный контроллер тоже подойдет
- Модуль Bluetooth НС06
- Мотор-шилд для Arduino
- Конструктор — гусеничное шасси с редуктором и эл. мотором
- Двухмоторный редуктор
- Универсальная платформа
- Кабельные перемычки Папа-Мама
Инструменты:
- Отвертка
- Паяльник
- Канифоль
Шаг 2: Собираем двухмоторный редуктор
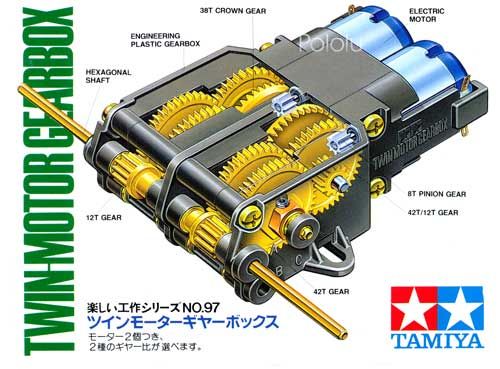

Распакуйте коробку с набором. Следуйте приложенной инструкции или приведенному видео-уроку. В набор входят два стандартных электромотора, тюбик смазки, шестигранный ключ, части редуктора и корпус.
Особое напоминание: используйте передаточное отношение 58:1.
Смазку нужно наносить на шестерни после сборки редуктора, а не до.
Обязательно используйте металлические разделители, иначе редуктор будет визжать.
Используйте передаточное отношение 58:1, так редуктор будет крутиться быстрее, чем на 204:1.
Шаг 3: Собираем шасси
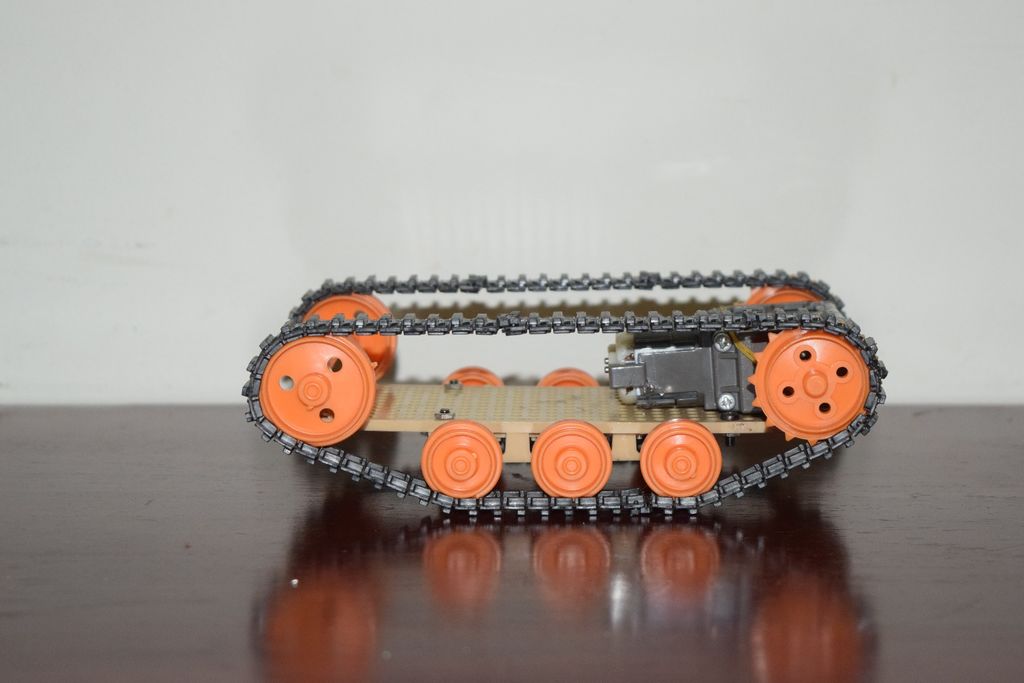

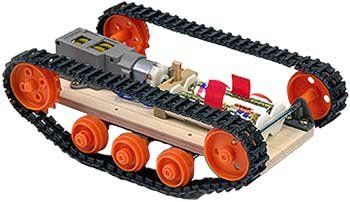
После завершения сборки редуктора вы можете распаковать универсальную платформу и гусеничное шасси. В комплект шасси входят одна шестерня и три типа роликов. Инструкция вам не понадобится, так как мы будем собирать свою конфигурацию.
Шаги сборки:
- закрепите двухмоторный редуктор на платформе винтом, в отверстие в последнем ряду
- наденьте ведомую шестерню на ось редуктора
- привинтите 1-е отверстие Г-образного крепежа к 6-ому отверстию платформы
- самый большой ролик крепим в первом отверстии Г-образного крепежа
- закрепите задний ролик в последнее отверстие Г-образного крепежа
- на заднюю часть платформы крепите ролики среднего размера
- самые маленькие ролики вам не понадобятся
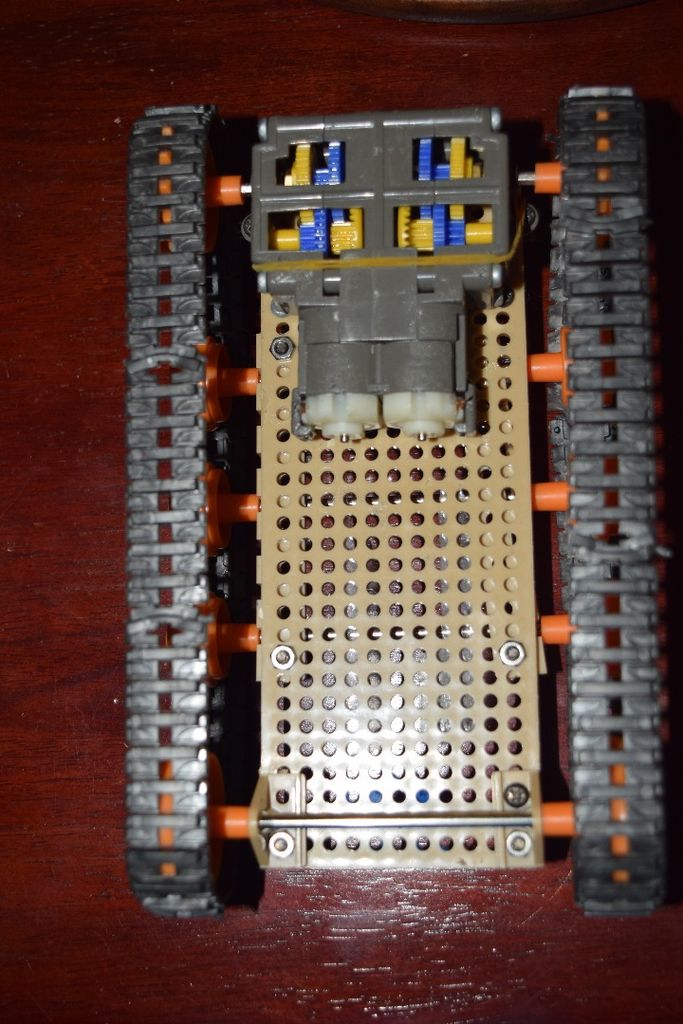
Шаг 4: Монтируем микроконтроллер и драйвер электродвигателей
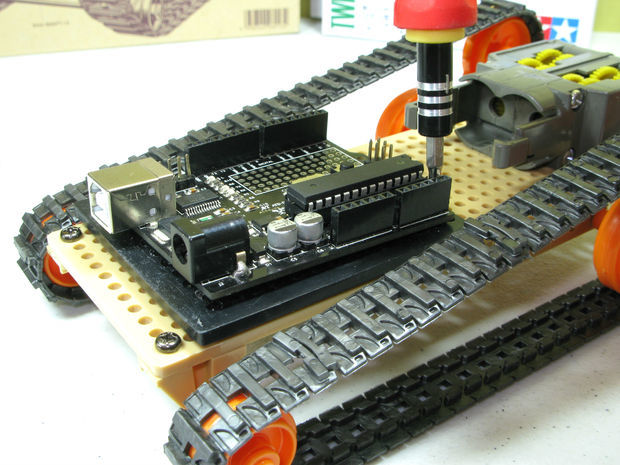
Просто привинтите плату Arduino на место, драйвер закрепите выше. Можно купить макетную плату меньшего размера или взять кусок акрилового листа, чтобы подложить под микроконтроллер. Можно для этого использовать изоляционную прокладку.
Так как у меня контроллер не Arduino, я подложил под него двухсторонний вспененный скотч, но это временное решение.
Используйте драйвер электродвигателя L293D. Я пытался подключить драйвер двигателей от Arduino, но у них разная распиновка с моим контроллером. Чтобы он работал, нужно было внести много изменений в код.
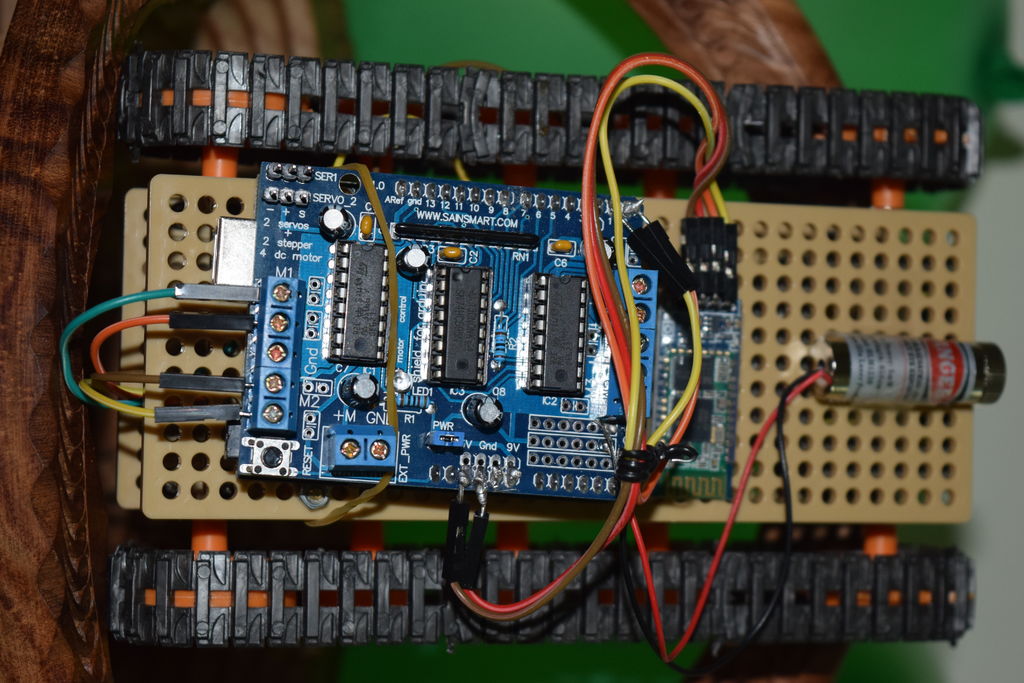
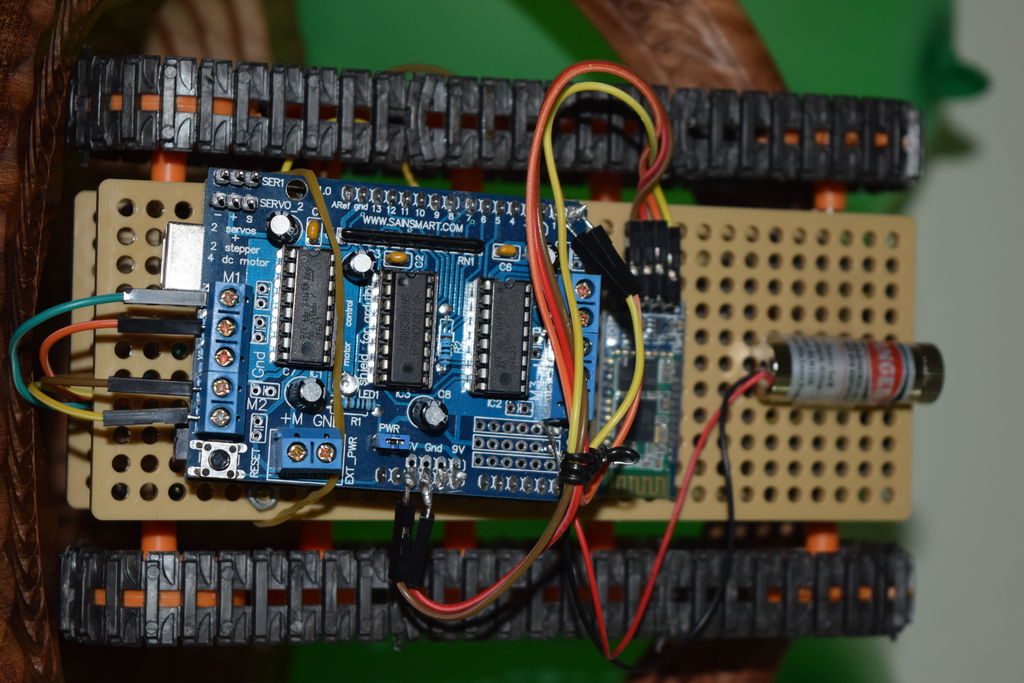
Шаг 5: Подключаем модуль Bluetooth
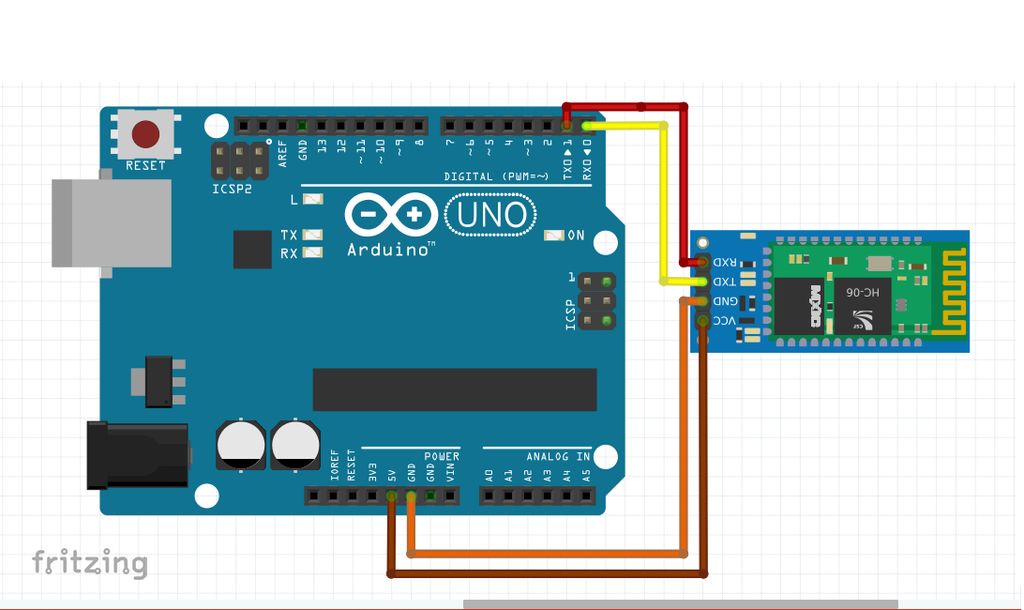
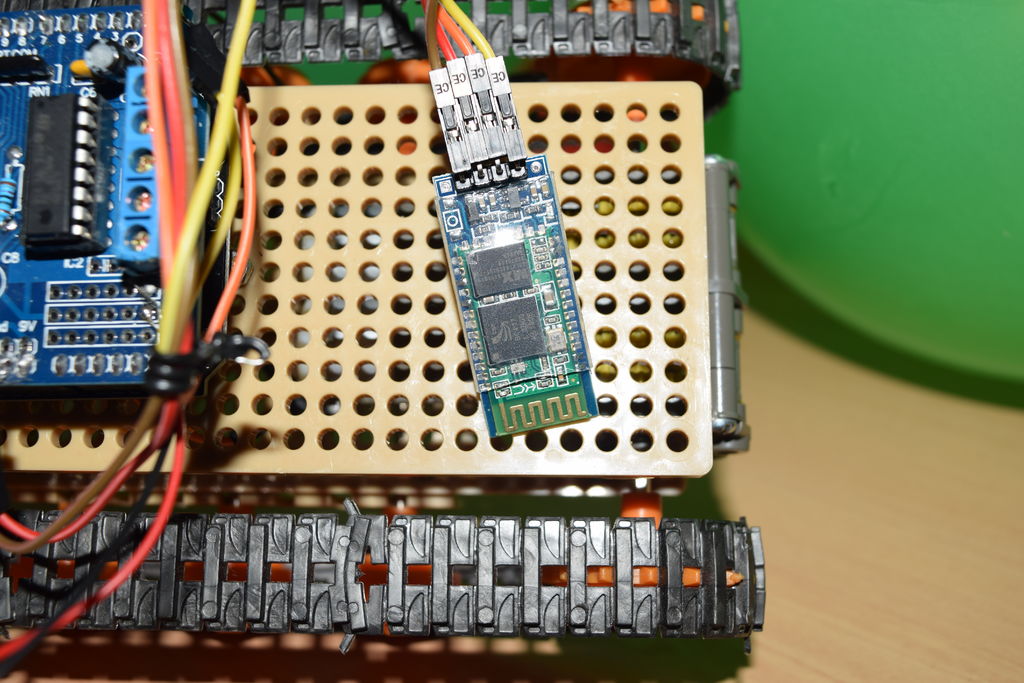
Модуль можно поместить в зазор между платой контроллера и редуктором. Или установить универсальную платформу сверху над редуктором и винтами М3 закрепить на ней контроллер и модуль.
Как работает модуль?
Итак, мы знаем, что приложение посылает цифровой сигнал на плату Arduino через Bluetooth (последовательная передача). Контроллер раскодирует их, используя условные предложения.
Соединения проводов:
- ТХ модуля ВТ – RX платы Arduino
- RX модуля ВТ – TX платы Arduino
- VCC модуля – 5В платы Arduino
- GND модуля — GND платы Arduino
Можно использовать для связи RF/ xBee/ WiFI трансивер для большей дистанции связи, но если вы хотите пользоваться приложением на смартфоне, лучше остановиться на ВТ-модуле, хотя у него дальность сигнала всего 20 м.
Шаг 6: Подключаем FPV-камеру


В моей машине нет FPV-камеры, но, если вы хотите установить ее, следуйте приведенной ниже инструкции.
Вид от первого лица (First-person view, FPV), или видео пилотирование – это метод пилотирования или вождения радиоуправляемых моделей от лица пилота или водителя. В основном используется для управления беспилотными летательными аппаратами (БПЛА). Такие аппараты управляются дистанционно с помощью бортовой FPV-камеры, передающей изображение на FPV-очки или монитор.
Эти камеры хороши при управлении на дальних дистанциях, но сегодня я упомянул о них для общего ознакомления.
Для использования FPV-камеры вам нужны будут передатчик и приемник. Их можно заказать на Амазоне, по отдельности или в наборе. Для работы камеры нужен будет элемент питания.
Шаг 7: Подключаем питание
Литий-полимерные аккумуляторы, возможно, самые мощные на сегодняшний день. Они маленькие, обладают большой емкостью и имеют высокий С-рейтинг. Они в 5-10 раз более мощные чем никель-кадмиевые/никель-металлгидридные батарейки типа АА.
Риски использования литий-полимерных аккумуляторов
Такие аккумуляторы могут вздуться, и тогда они становятся бесполезными. Эти аккумуляторы нужно обязательно перезаряжать раз в две недели, чтобы они не вздулись. Им нужно специальное балансировочное ЗУ, заряд малым током разрушит аккумулятор.
Лучшим вариантом будет использование внешнего аккумулятора для смартфонов, его можно подключить к Arduino USB-кабелем, идущим в комплекте.
Шаг 8: Коды к Arduino (C++)
Просто скачайте скетч для Arduino. Если вы используете Sainsmart мотор-шилд, вам нужно скачать и установить библиотеку.
Эти коды достаточно простые.
- для контроля моторов я использую библиотеку
- коммуникация между смартфоном и ВТ-модулем осуществляется посредством последовательной коммуникации
- приложение «Bluetooth RC Controller» посылает на ВТ-модуль следующие команды:
- вперед – F
- назад – В
- лево – L
- право – R
- вперед влево – G
- вперед вправо – I
- назад влево – Н
- назад вправо – J
- стоп – S
- передние огни включить – W
- передние огни выключить – w
- задние огни включить – U
- задние огни выключить – u
- звуковой сигнал включить – V
- звуковой сигнал выключить – v
- extra включить – X
- extra выключить – х
- скорость 0 – 0
- скорость 10 – 1
- скорость 20 – 2
- скорость 30 – 3
- скорость 90 – 9
- скорость 100 – q
- остановить все действия – D
В нашем проекте мы будем пользоваться только базовыми командами – вперед, назад, право и лево. Для загрузки доступен полный код.
Приложение для скачивания: Arduino Bluetooth RC Car только для устройств на базе Android
Дальнейшие шаги:
- скачайте приложение
- включите Bluetooth на смартфоне и откройте приложение
- установите сопряжение между телефоном и модулем
- Войдите в настройки приложения, выберите «Установить соединение», выберите LINVOR (дефолтное имя вашего ВТ-модуля).
- подождите пока красный огонек не сменится зеленым. Все готово!
Файлы
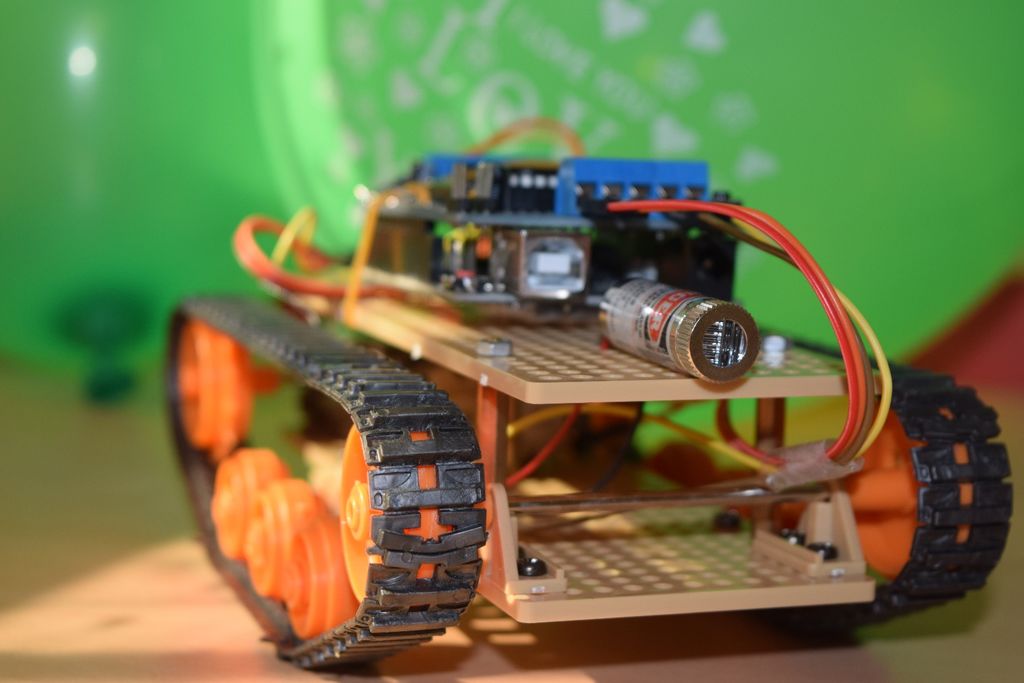
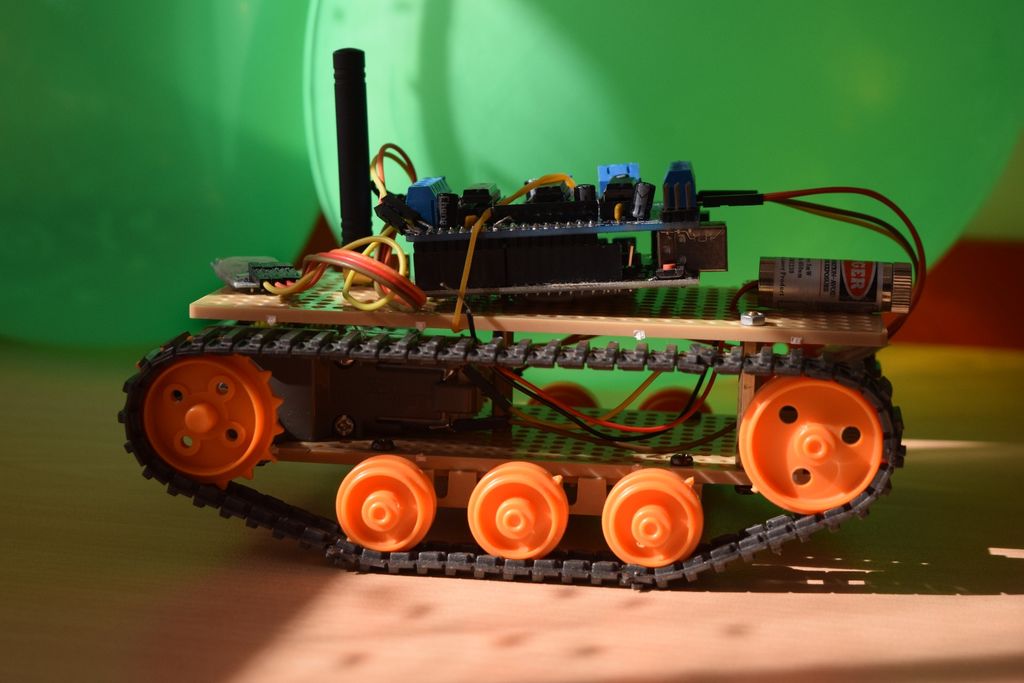
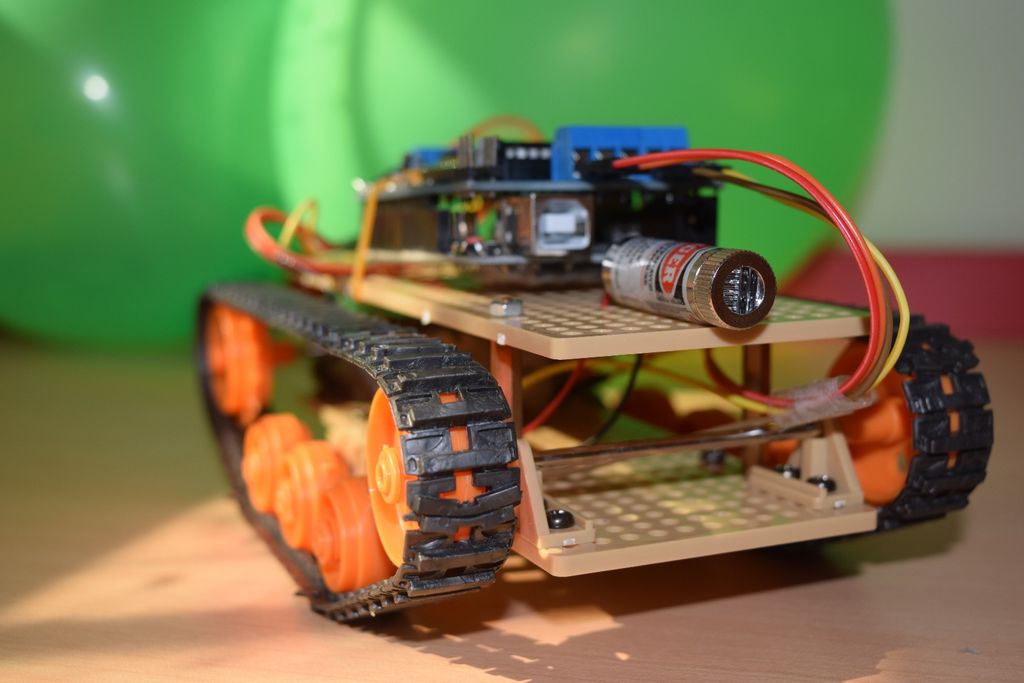
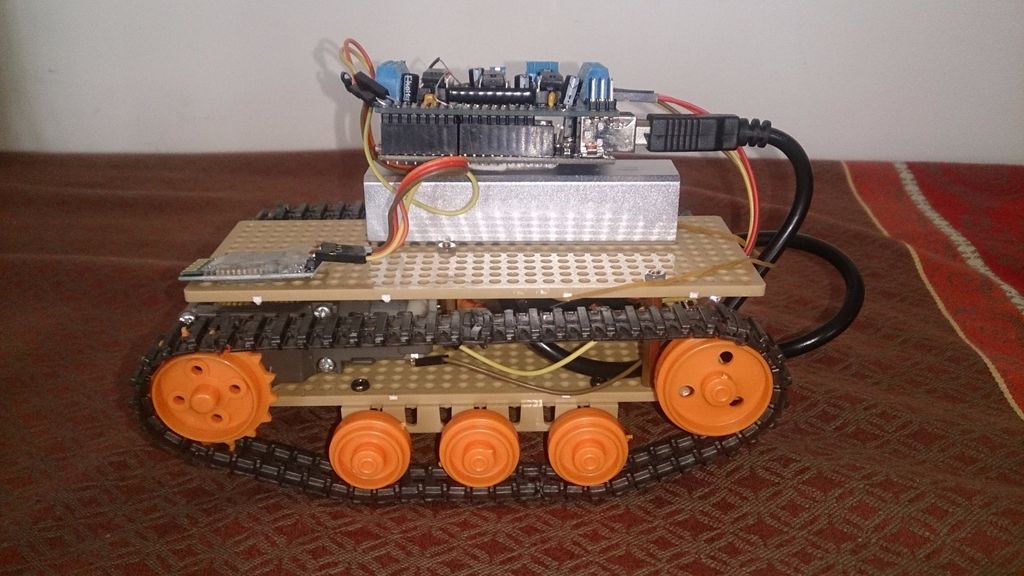
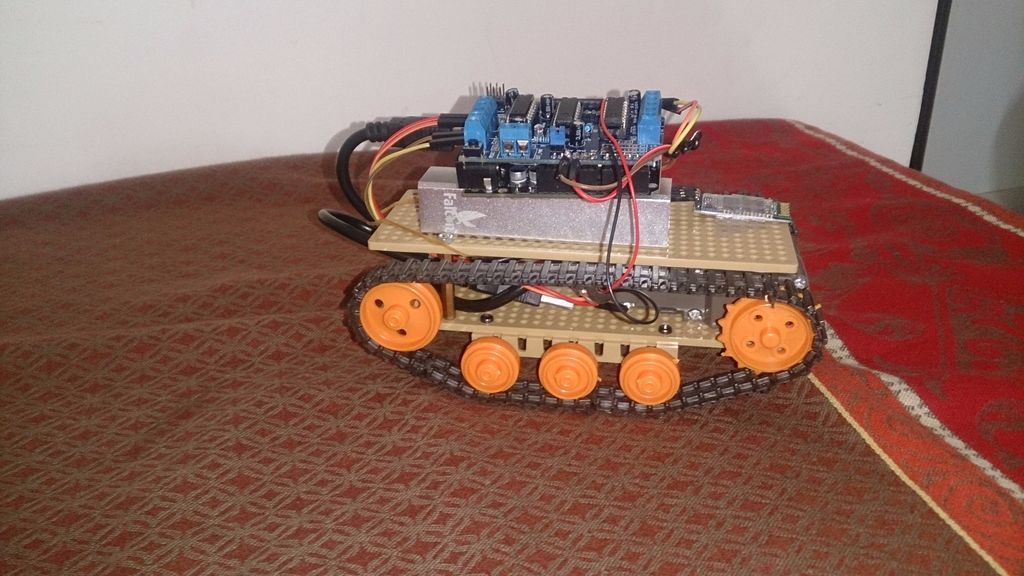
Шаг 9: Законченная самоходная установка

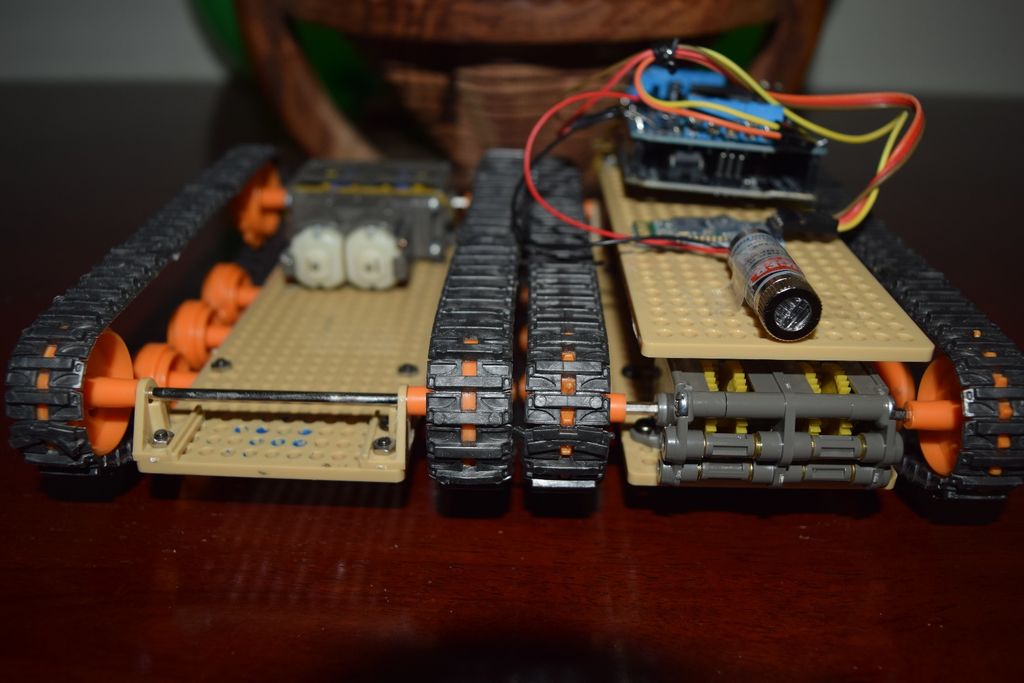
Теперь у вас есть все, чтобы самому собрать машинку на радиоуправлении своими руками с Bluetooth-управлением. Просто и интересно.
Идеи по улучшению радиоуправления на Ардуино:
- Ультразвуковые сенсоры для огибания препятствий
- Модули Xbee для увеличения дальности сигнала
- Камера FPV для съемки в режиме реального времени
- Подвеска для улучшения шасси
- Более мощные моторы для более быстрой езды
- Установка мотор-шилда Pololu Dual VNH5019, для дальнейшей установки мощных моторов





