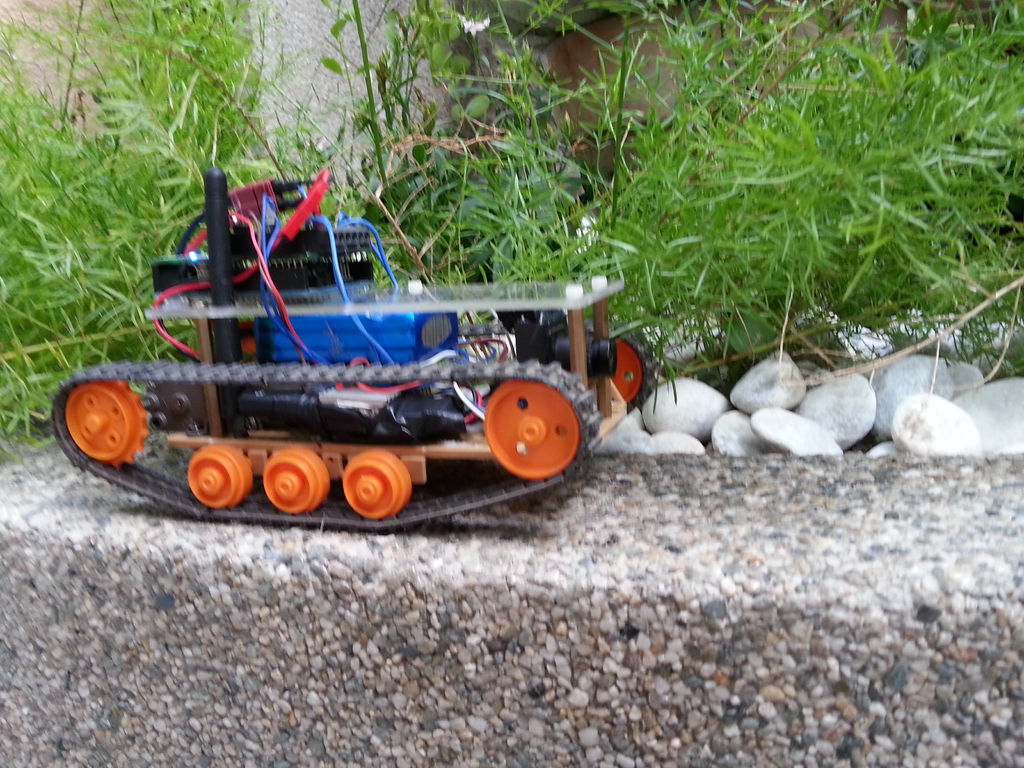
Давайте соберём танк на радиоуправлении с видом от первого лица, которым можно управлять на расстоянии до 2 километров! Мой проект разрабатывался на основе вездехода с пультом управления, его легко собрать, легко запрограммировать и это отличный проект для любителей!

Бот очень быстр и проворен, не говоря уже о том, что он несёт в себе два мощных двигателя! Он, безусловно, обгонит человека, вне зависимости от того, на какой поверхности проводятся гонки!
Бот до сих пор является прототипом, даже после того, как на его разработку были потрачены месяцы.
Итак, что же такое FPV?
FPV, или First Person View — это Вид от Первого Лица. Обычно мы видим FPV во время игры за приставками и компьютером, например в гонки. Также FPV используется военными для слежки, защиты или для контроля за защищенными зонами. Любители используют FPV в квадрокоптерах для воздушных съемок и просто ради веселья. Всё это звучит настолько же здорово, насколько дорого стоит сборка квадрокоптера, поэтому мы решили построить что-то меньшее по размеру, что ездит по земле.
Как этим управлять?
Бот базируется на плате Ардуино. Так как Ардуино поддерживает большое разнообразие надстроек и модулей (RC/ WiFi/ Bluetooth), то можно выбрать любой из типов связи. Для данной сборки мы будем использовать особые компоненты, которые позволят осуществлять управление на больших расстояниях, используя 2.4Ghz передатчик и ресивер, управляющий ботом.
В последнем шаге есть демонстрационное видео.
Содержание статьи
Шаг 1: Инструмент и материалы





Большинство запчастей я покупаю в местных магазинах для хобби, остальное нахожу онлайн — просто ищите предложения с лучшей ценой. Я использую много решений от Tamiya и моя инструкция написана с учётом этой особенности.
Запчасти и материалы я покупал в Gearbest — на тот момент у них была распродажа.
Нам понадобятся:
- клон Ардуино УНО R3
- Плата Pololu Dual VNH5019 Motor Shield (2x30A)
- Пины-папы
- 4 распорки
- Винты и гайки
- Модуль передачи сигнала (трансмиттер) 2.4 Ghz — читайте подробнее в шаге 13
- Ресивер 2.4 Ghz минимум на два канала
- 2 моторчика Tamiya Plasma Dash / Hyper dash 3
- Набор коробки передач Tamiya Twin Motor Gearbox (стоковые моторчики в комплекте)
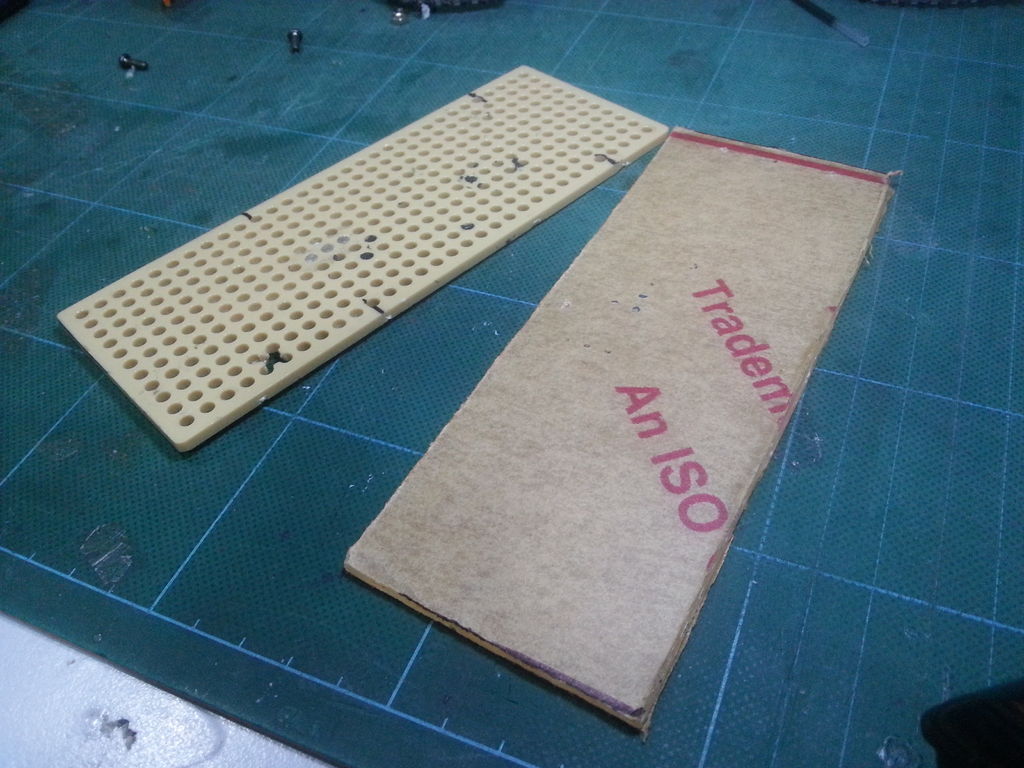
- 2 универсальных платы Tamiya
- набор гусениц и колес Tamiya
- 3 литий-полимерных батарейки 1500mAh
- камера с видом от первого лица с поддержкой удалённого управления направлением и зумом
- трансмиттер и ресивер данных для FPV 5.8Ghz 200mW
- Бутылка суперклея
- Горячий клей
Инструмент:
- Мультитул
- Набор отвёрток
- Дремель
Шаг 2: Сборка парной коробки передач

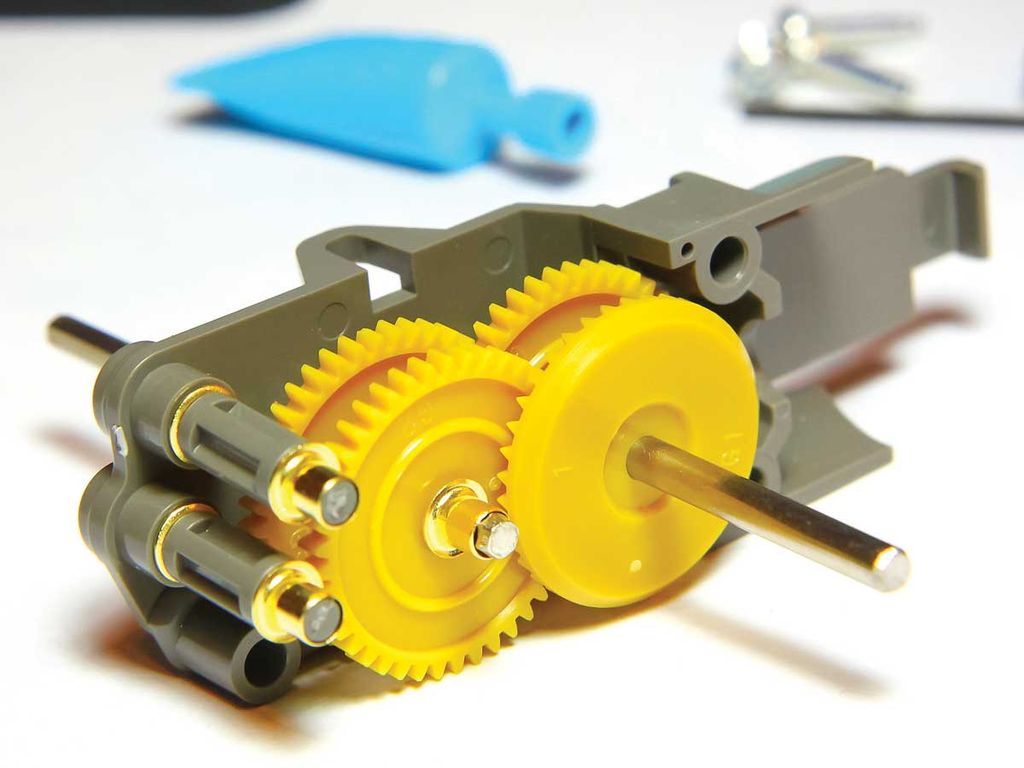
Время для распаковки коробки передач. Просто следуйте инструкции, и всё будет в порядке.
Важная заметка: используйте соотношение шестеренок 58:1!!!
Советы:
- смазывайте шестерёнки перед сборкой коробки, а не после
- не забудьте о металлических спейсерах, иначе коробка будет скрипеть
- используйте формат шестеренок 58:1, он быстрее, чем 204:1
Шаг 3: Улучшаем моторчики

Коробка передач поставляется с моторчиками, но, по моему мнению, они очень медленные. Поэтому я решил использовать в проекте моторчики Hyper dash, вместо Plasma Dash, которые потребляют больше энергии.
Тем не менее, моторчики Plasma Dash являются самыми быстрыми в серии моторчиков Tamiya’s 4WD. Моторчики стоят дорого, но вы получите лучший продукт за эти деньги. Эти моторчики с углеродным покрытием вращаются с частотой 29000 оборотов в минуту на 3V и 36000 оборотов в минуту на 7V.
Моторчики рассчитаны на работу с источниками питания на 3V и увеличение напряжения, хотя и повышает производительность, но снижает их срок службы. С драйвером Pololu 2×30 Motor Driver и двумя литий-полимерными батарейками, программа в Ардуино должна быть настроена на максимальную скорость 320/400, вскоре в шаге с кодом вы выясните что это значит.
Шаг 4: Драйверы моторчиков
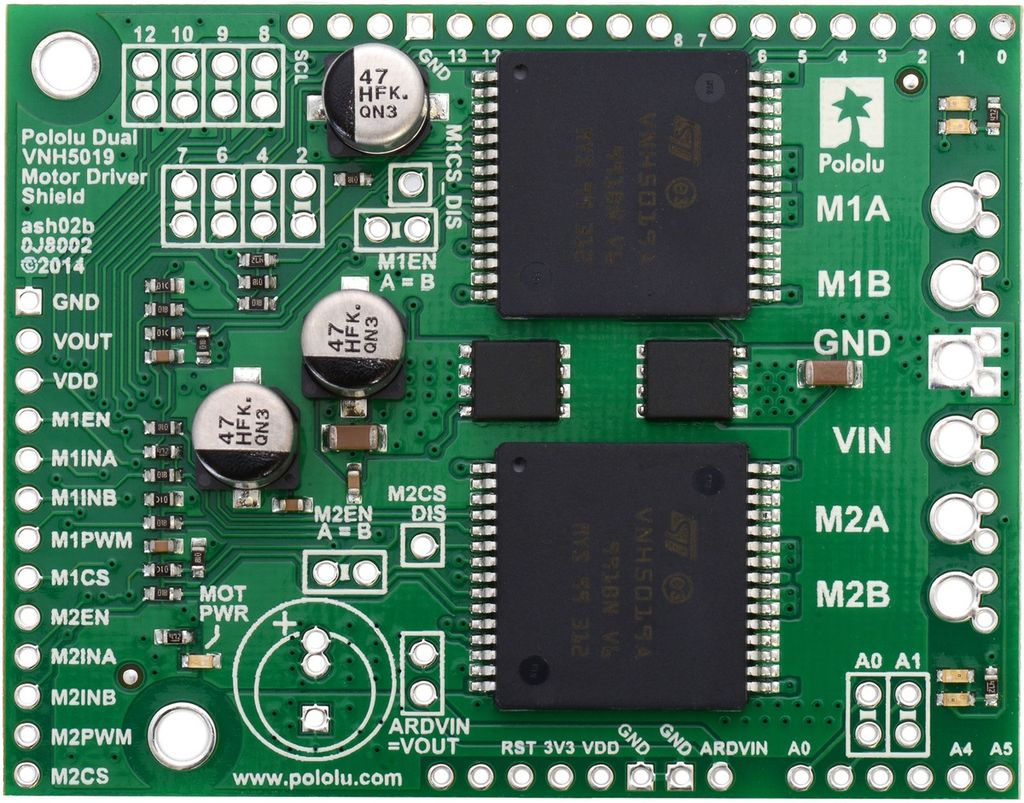
Я очень долго увлекаюсь робототехникой и могу сказать. что лучшим драйвером двигателей является Pololu Dual VNH5019. Если дело касается мощности и эффективности, то это лучший вариант, но когда мы говорим о цене — он явно не наш друг.
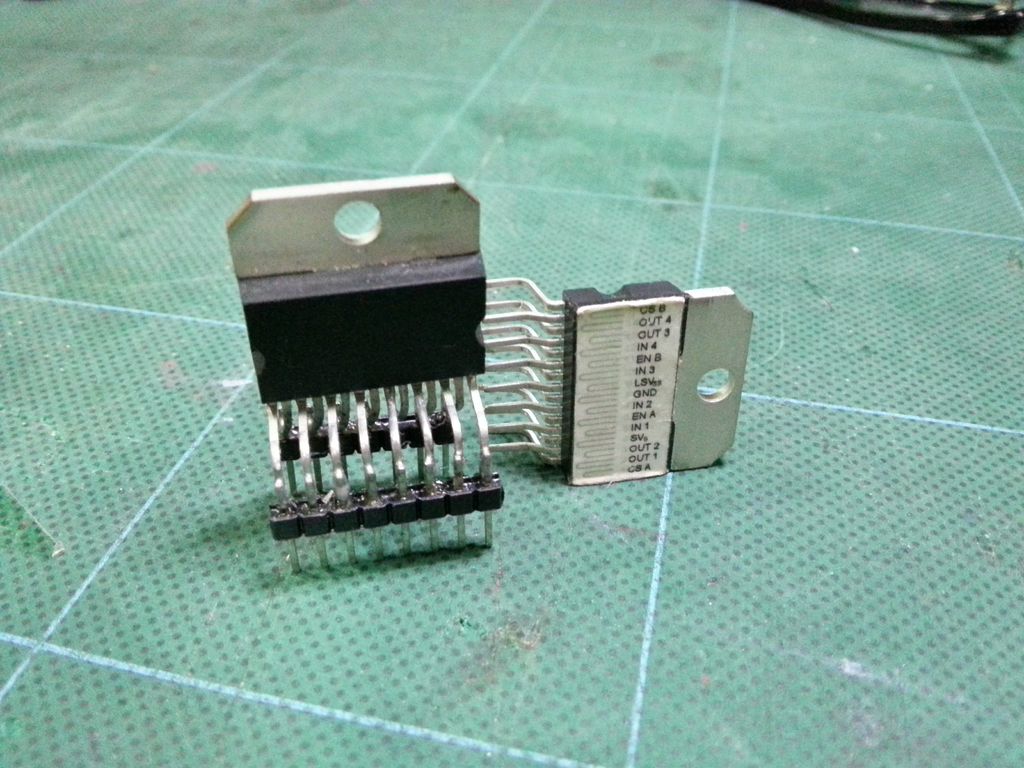
Другим вариантом будет собрать драйвер L298. 1 L298 рассчитан на один моторчик, что является лучшим решение для моторчиков для высокой силы тока. Я покажу вам, как собрать свою версию такого драйвера.
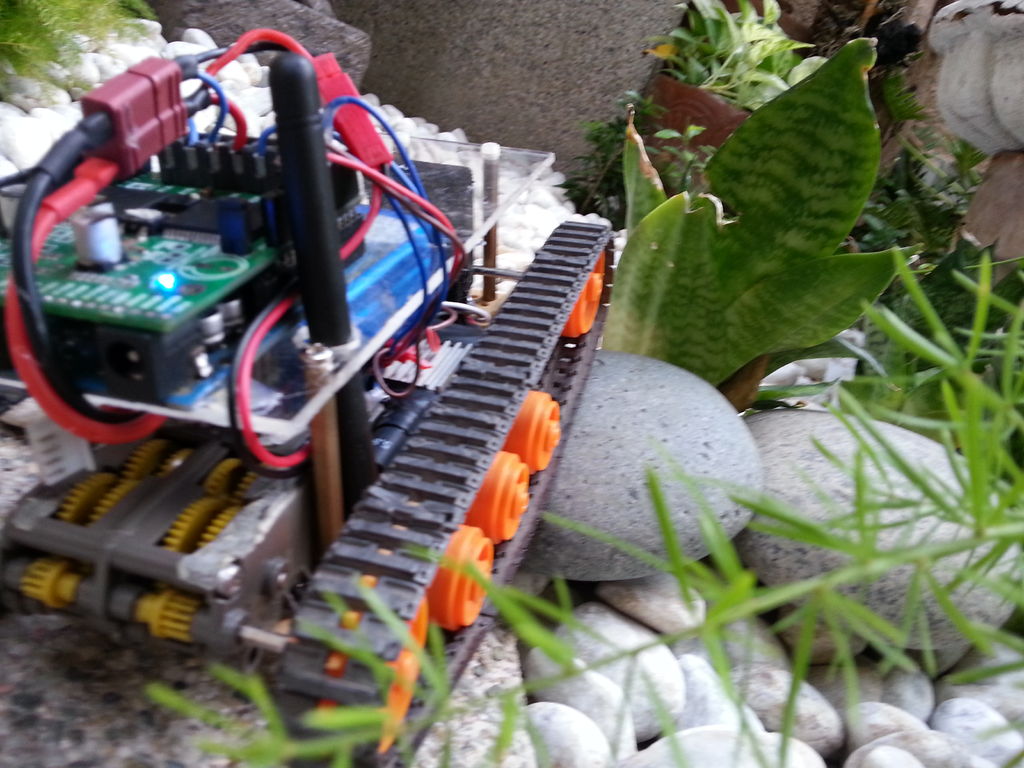
Шаг 5: Сборка гусениц
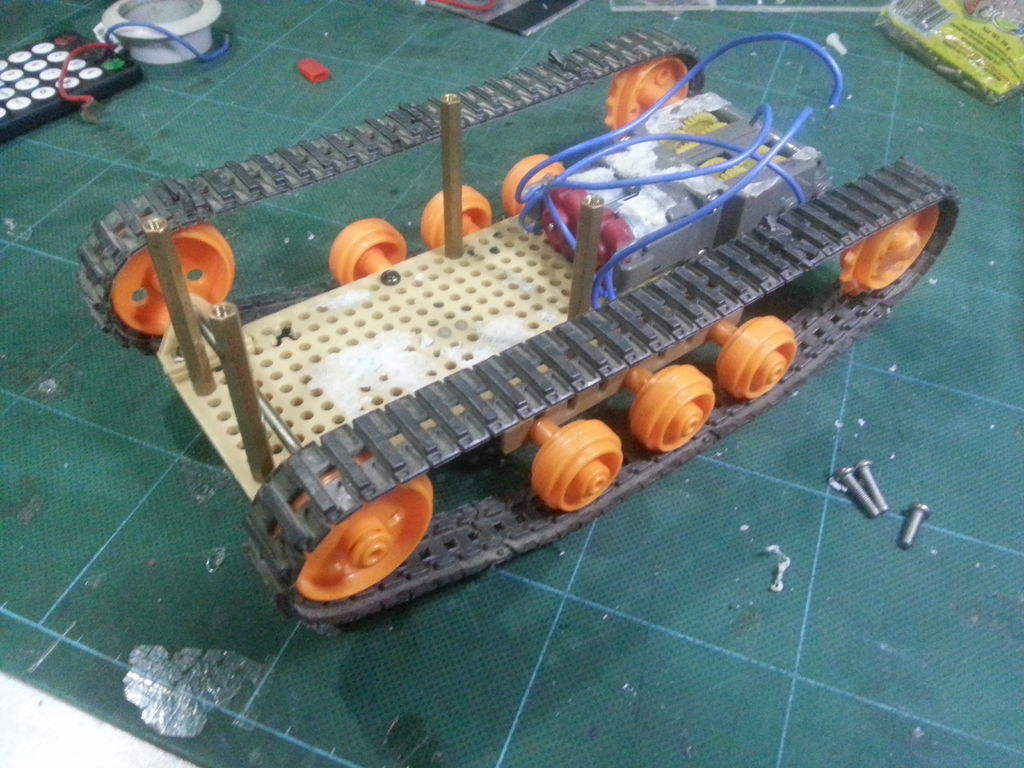

Включите воображение и сконфигурируйте гусеницы по своему вкусу.
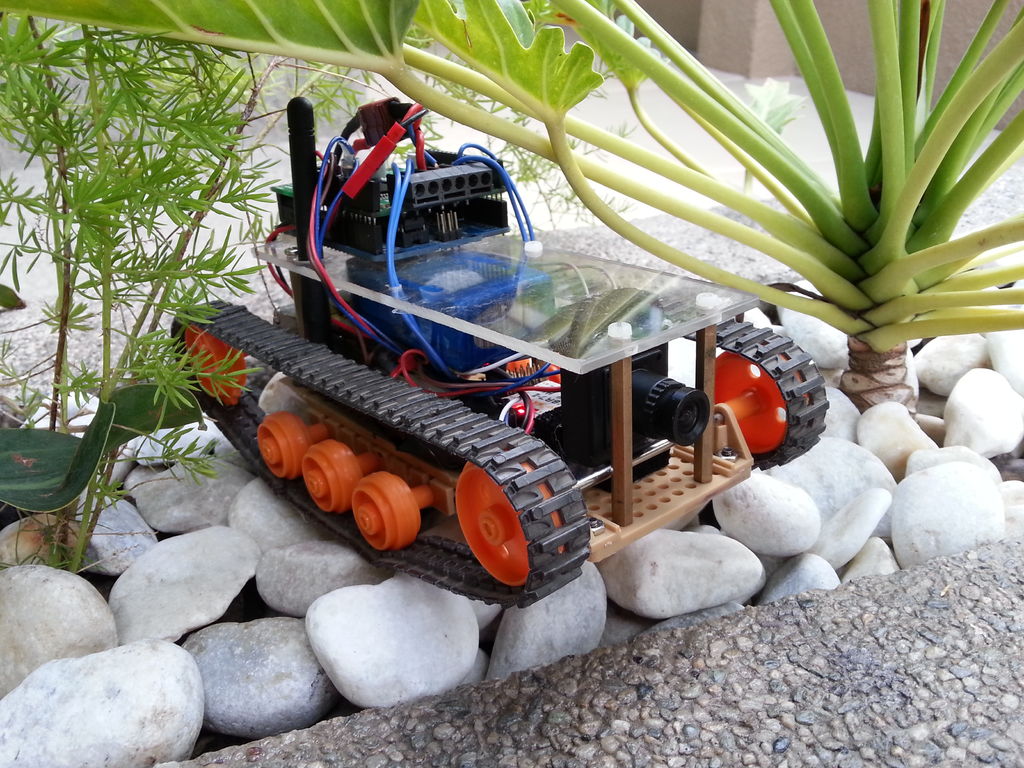
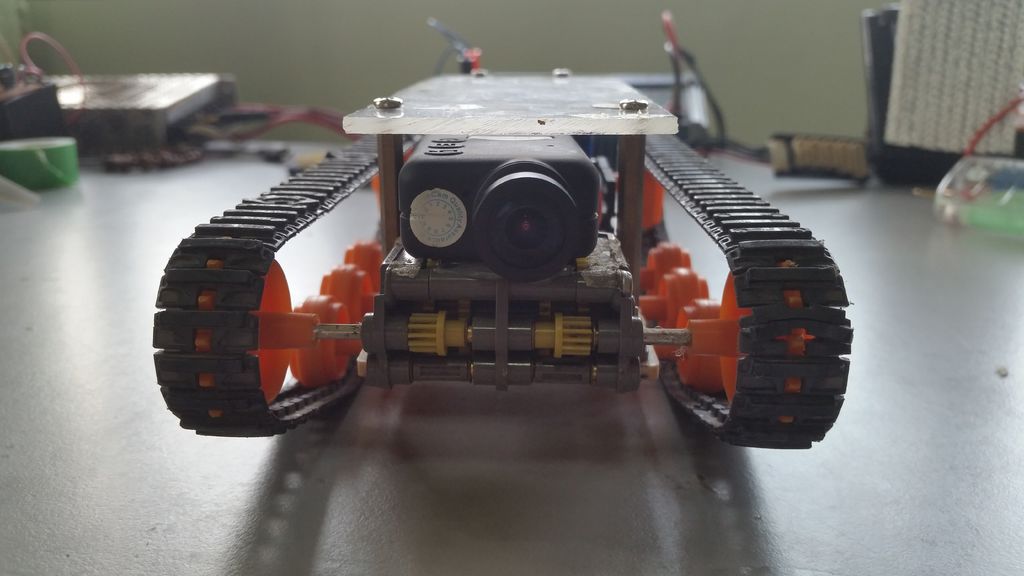
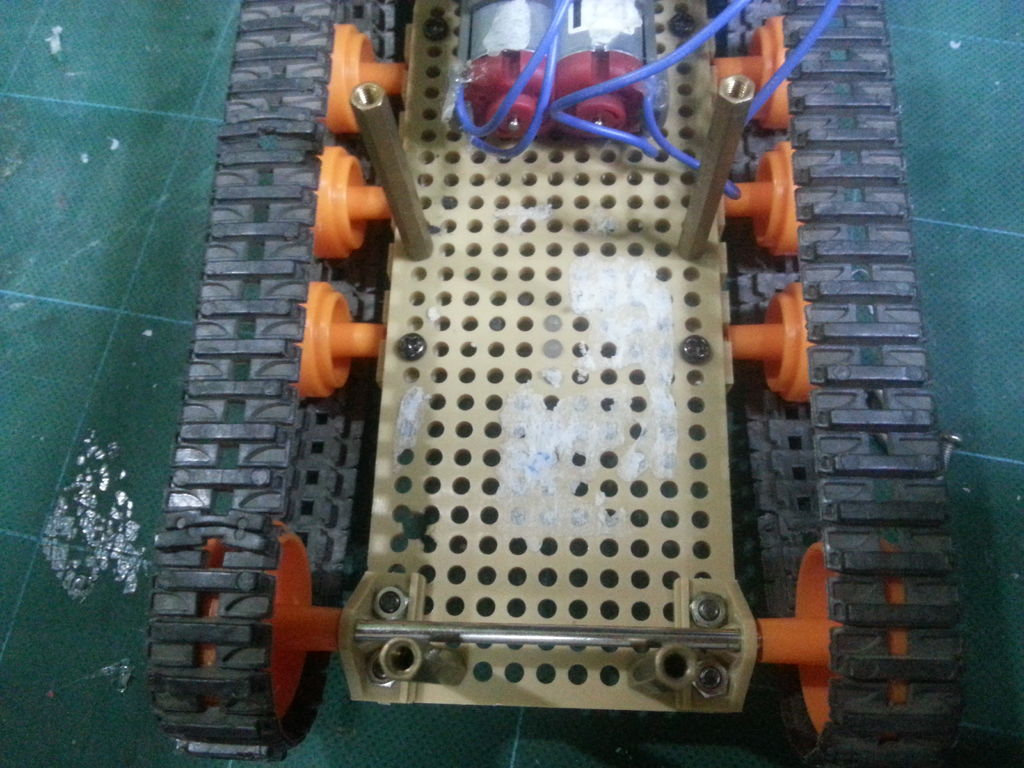
Шаг 6: Прикрутите распорки и прикрепите FPV
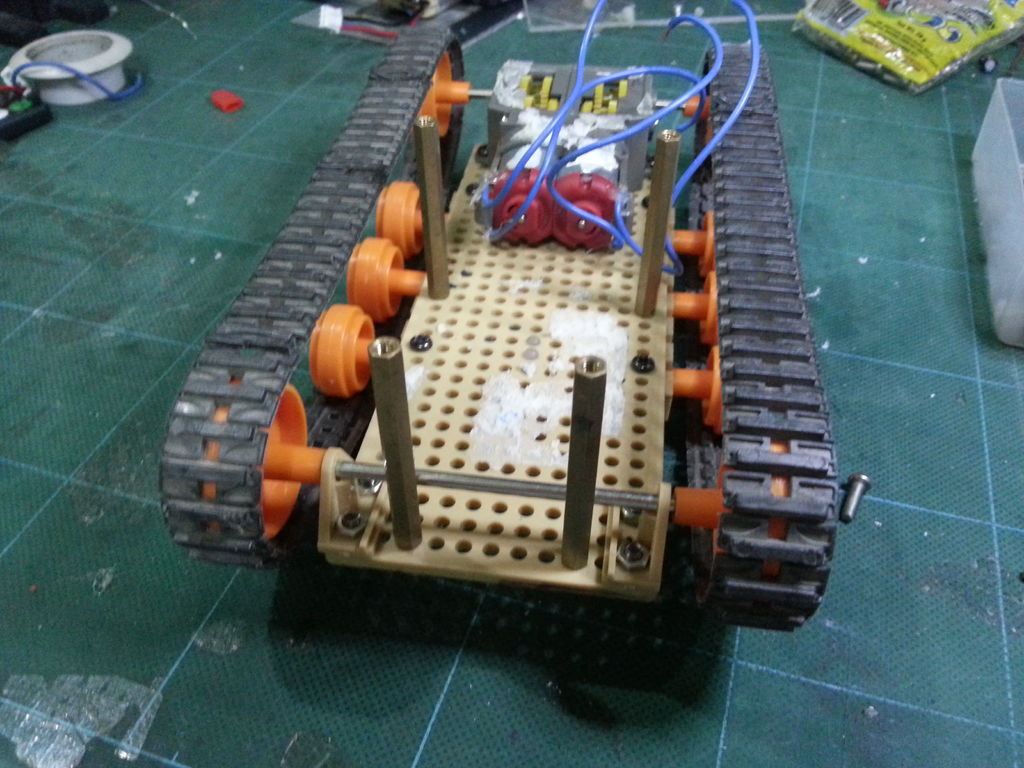

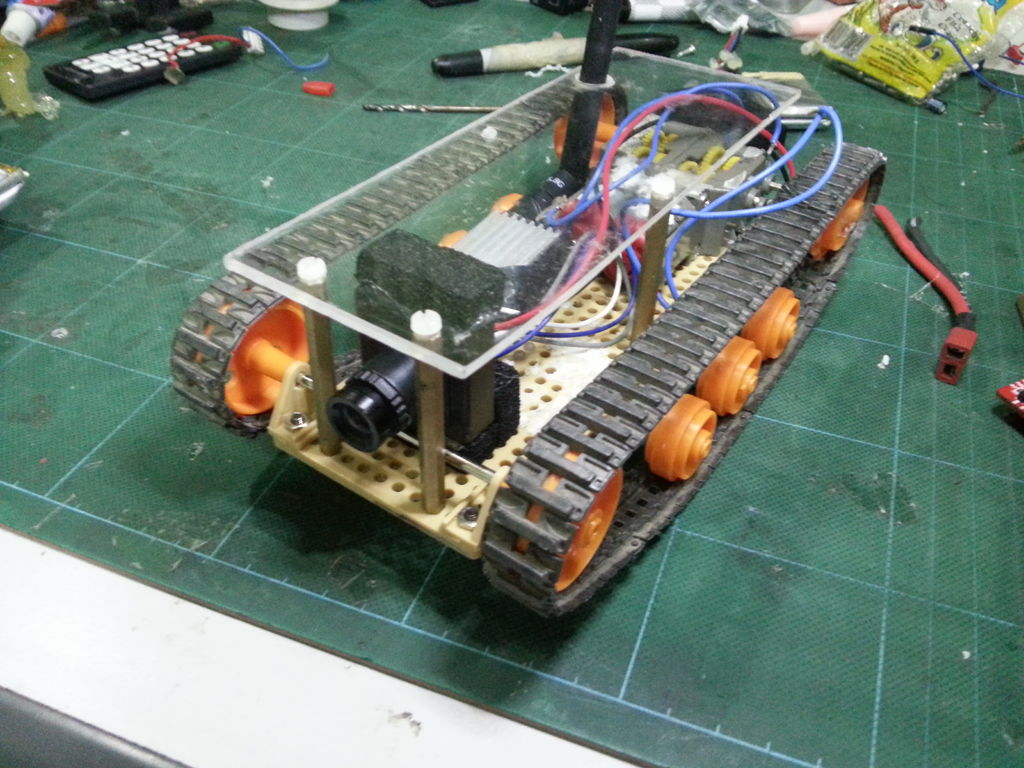
Опять же, подключите ваше воображение и придумайте как расположить распорки и камеру для вида от первого лица. Закрепите всё при помощи горячего клея. Прикрепите верхнюю палубу и просверлите дырки для крепления антенны FPV и под установленные распорки, после этого закрепите всё на винты.
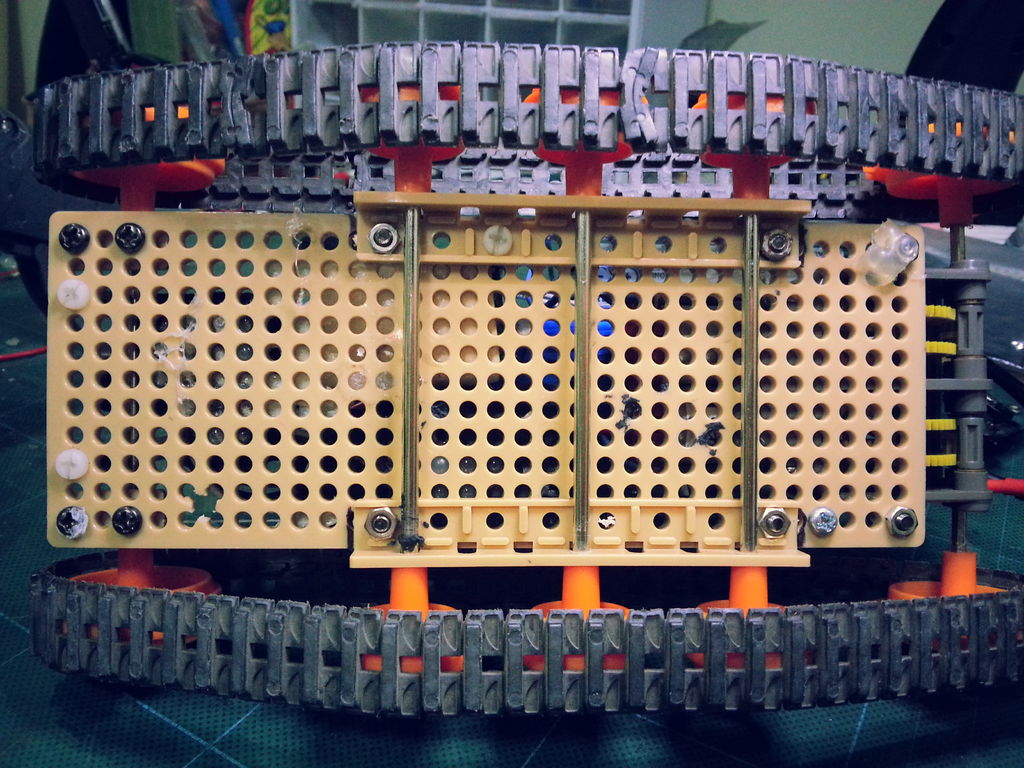
Шаг 7: Верхняя палуба
Целью создания верхней палубы было увеличение свободного места, так как компоненты FPV занимают очень много пространства в нижней части дрона, не оставляя места для Ардуино и драйвера моторчиков.
Шаг 8: Установите Ардуино и драйвер моторчиков
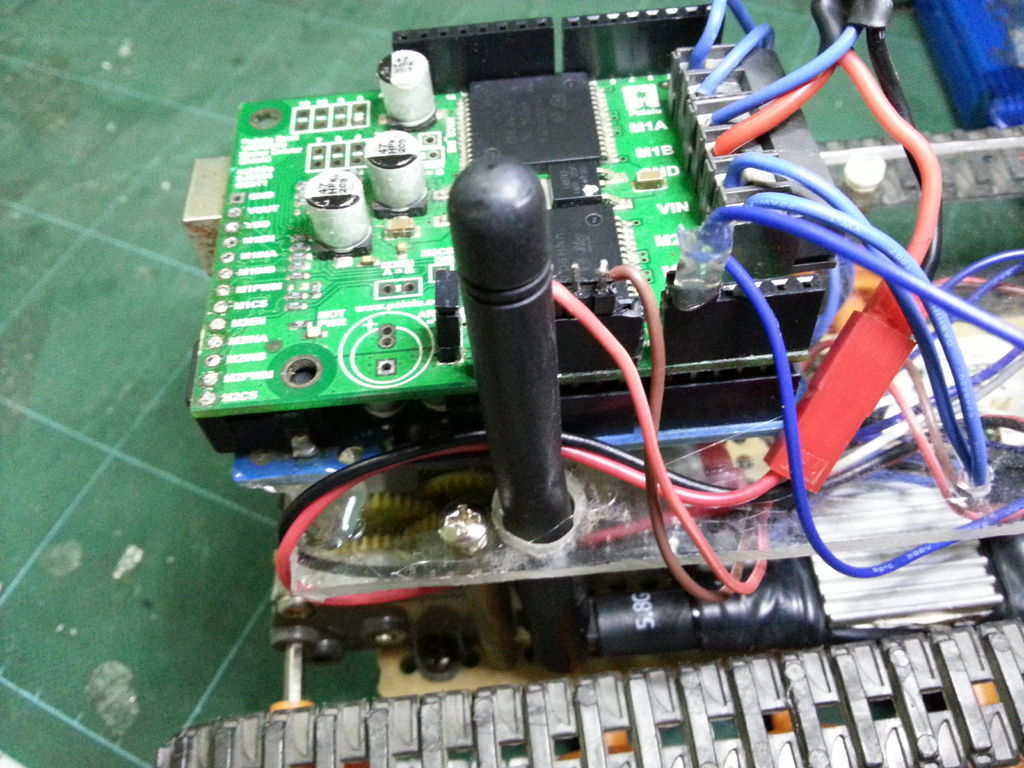
Просто прикрутите или приклейте Ардуино на свое место на верхней палубе, а затем пристыкуйте поверх него драйвер моторчиков.
Шаг 9: Устанавливаем модуль ресивера
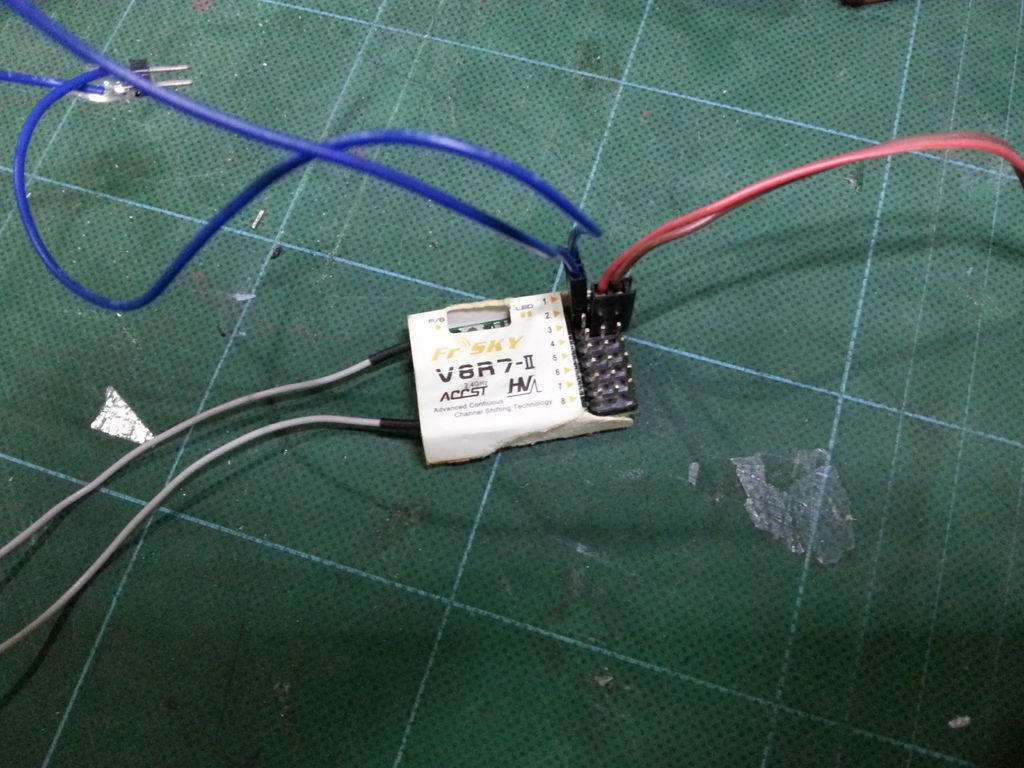
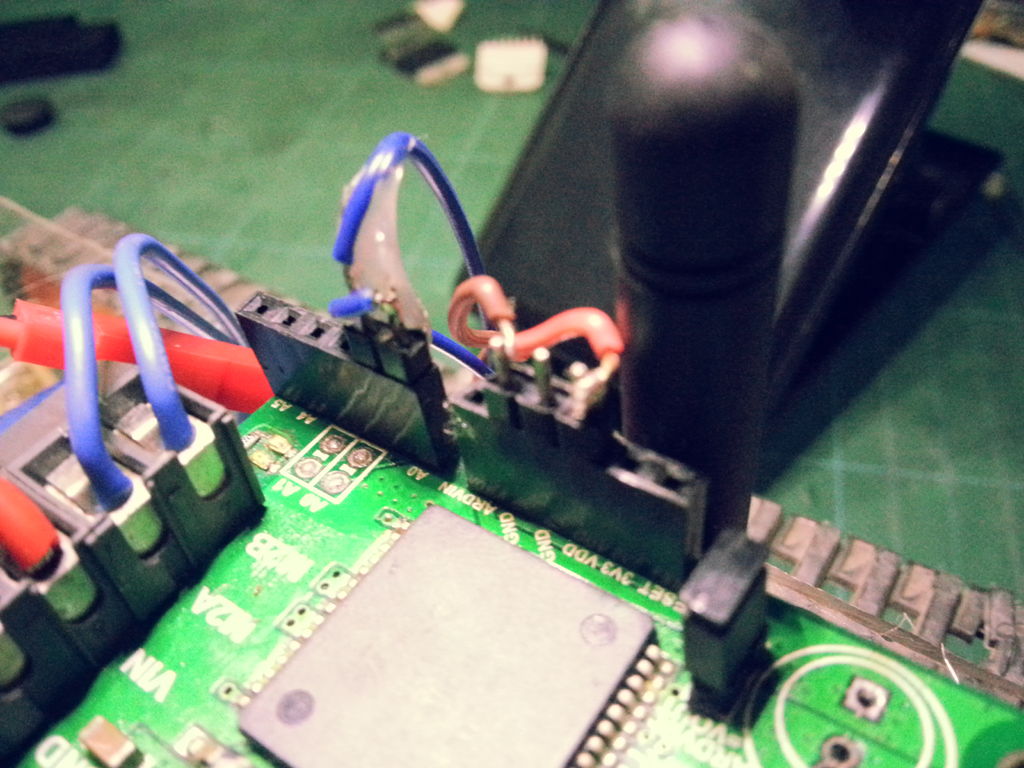
Пришло время соединить модуль Rx с Ардуино. Используя каналы 1 и 2, соедините канал 1 с А0, а 2 с А1. Подключите ресивер к пинам 5V и GND на Ардуино.
Шаг 10: Соедините моторчики и батарейки
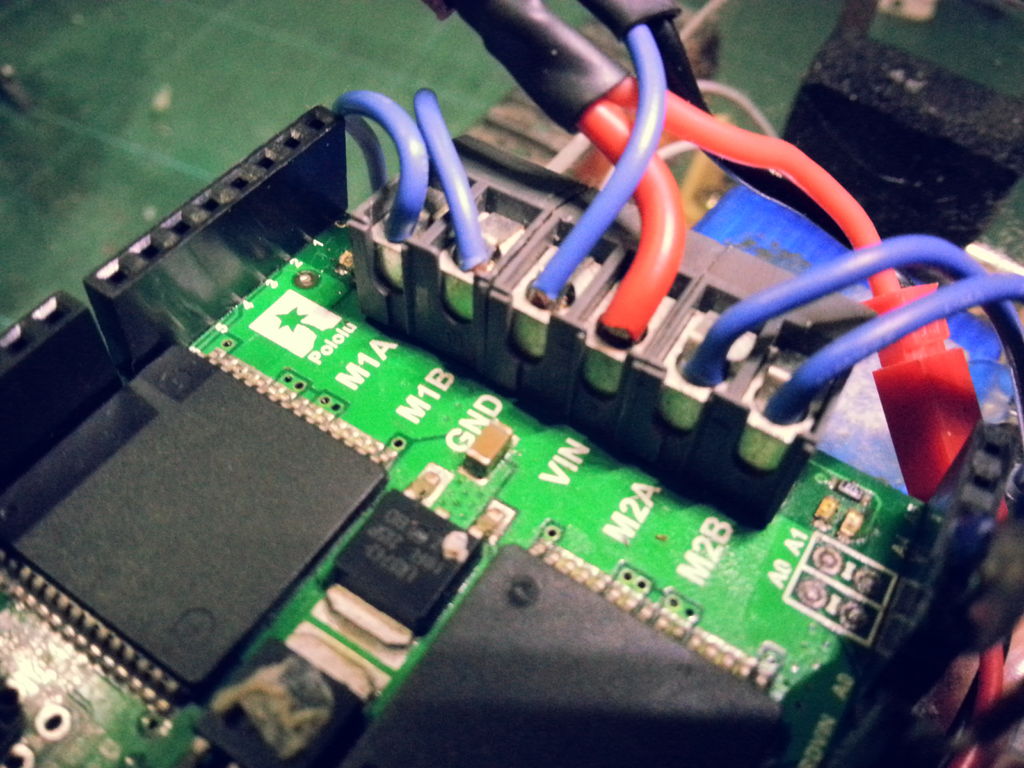
Припаяйте провода к моторчику и соедините их с драйвером соответственно каналам. Касаемо батарейки, вам нужно будет создать свой коннектор, используя штекер JST-папу и штекеры дины-папы. Посмотрите фотографии, чтобы лучше понять, что от вас потребуется.
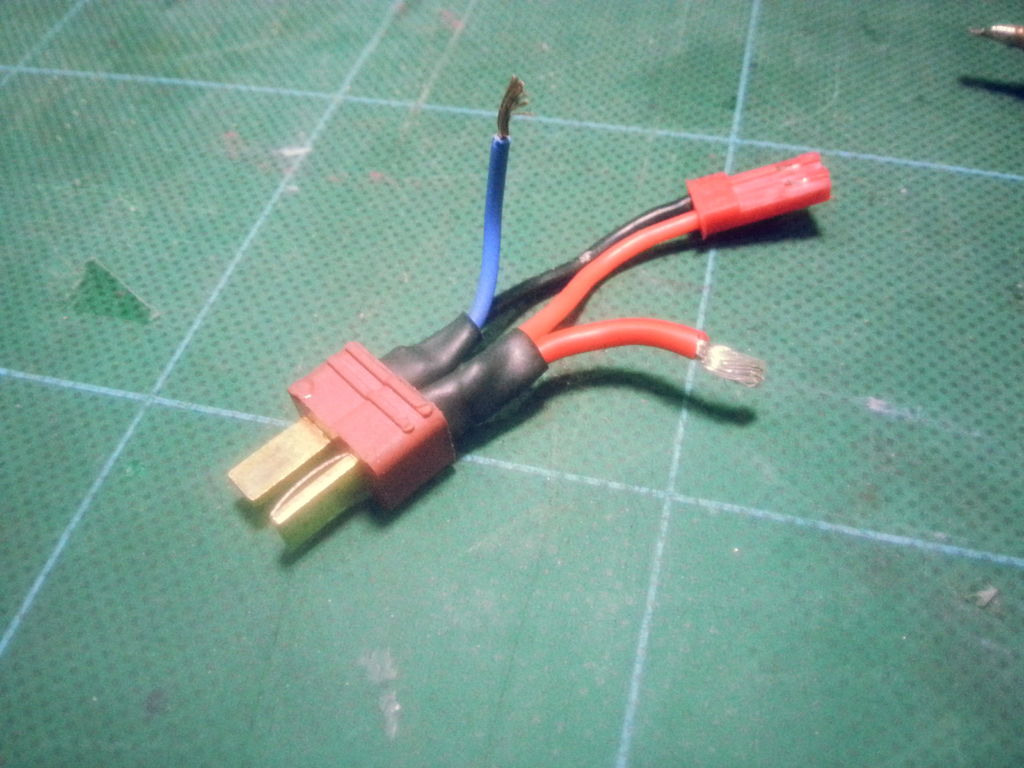
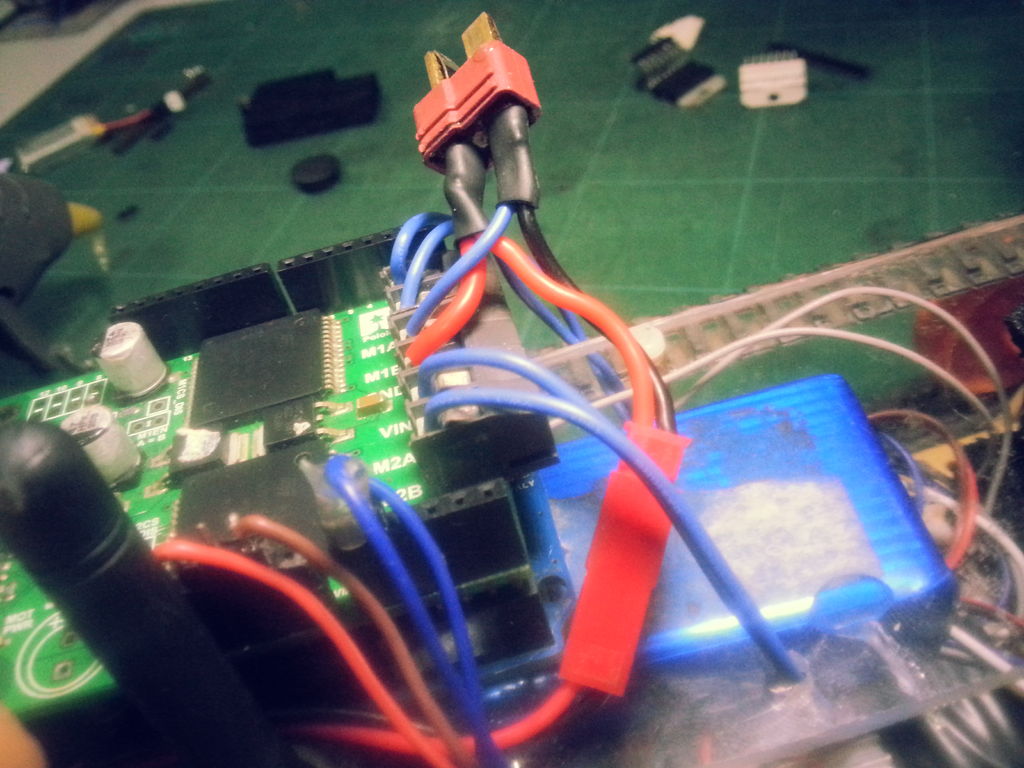
Шаг 11: Батарейка
Возьмите батарейку и определите место, на которое вы её установите.
Как только вы подберёте для нее место, создайте адаптер-папу для подключения к батарейке. Батарейка 3S 12V Li-po будет питать камеру FPV, моторчик и Ардуино, так что вам нужно будет создать коннектор для линии питания моторчиков и линии FPV.
Шаг 12: Код для Ардуино (C++)
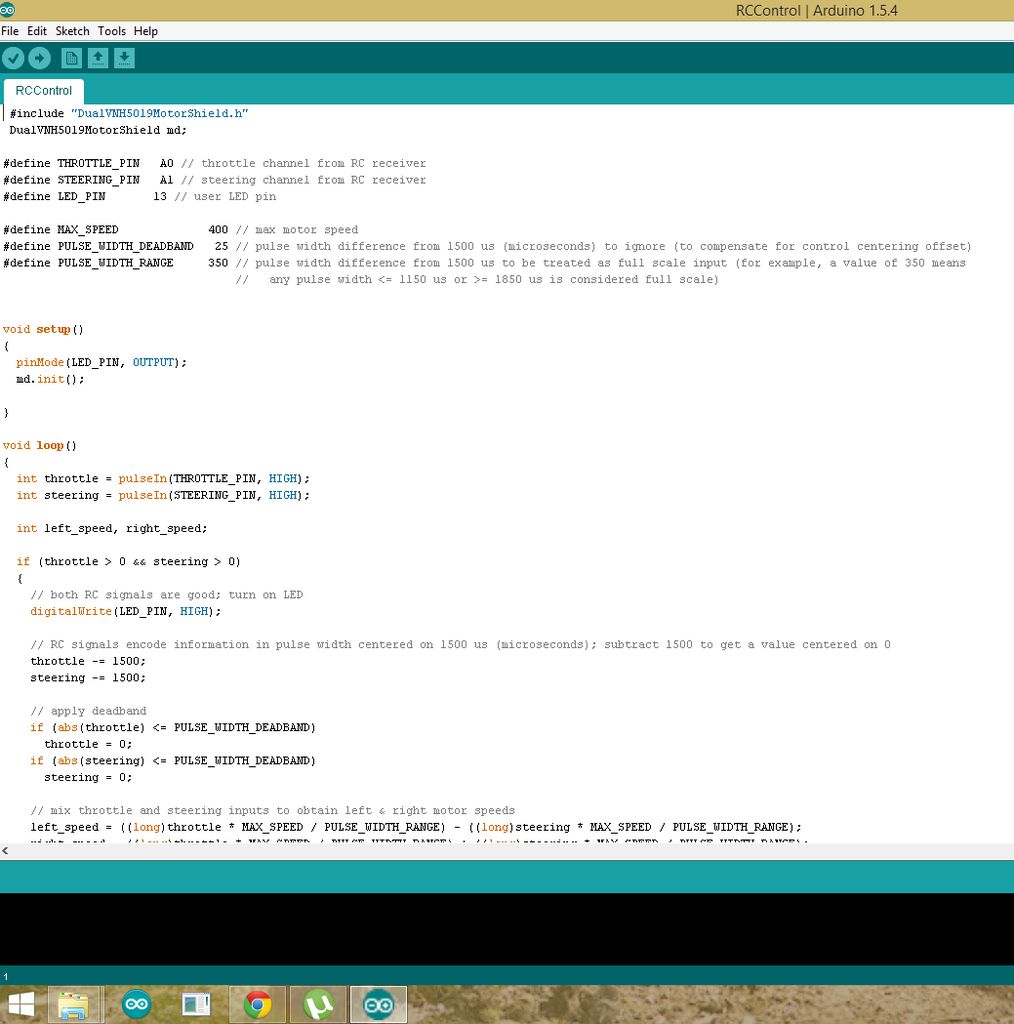
Код очень прост, просто загрузите его и всё должно заработать с драйвером моторчиков VNH (удостоверьтесь, что скачали библиотеку драйвера и положили её в папку библиотек Ардуино).
Код схож с Zumobot RC, я просто заменил библиотеку драйвера моторчиков и настроил кое-какие штуки.
Для драйвера L298 используйте стандартную программу Zumobot, только соедините всё согласно тому, как написано в библиотеке.
#define PWM_L 10 ///левый мотор
#define PWM_R 9
#define DIR_L 8 ///левый мотор
#define DIR_R 7
Просто загрузите код и приступайте к следующему шагу.
Файлы
Шаг 13: Контроллер


На рынке есть разные типы контроллеров для радиоуправляемых игрушек: для воды, земли, воздуха. Они также работают на различных частотах: AM, FM, 2.4GHz, но, в конце концов, все они остаются обычными контроллерами. Я точно не знаю название контроллера, но знаю, что он используется для воздушных дронов и имеет больше каналов по сравнению с наземным или водным.
На данный момент я использую Turnigy 9XR Transmitter Mode 2 (No Module). Как вы видите, в названии говорится, что он безмодульный, это означает, что вы сами выбираете, какой модуль связи 2.4GHz в него встроить. На рынке есть дюжины брендов, у которых есть свои особенности использования, управления, расстояния и другие разные фишки. Сейчас я использую FrSky DJT 2.4Ghz Combo Pack for JR w/ Telemetry Module & V8FR-II RX, который стоит дороговато, но просто посмотрите на его спецификацию и плюшки, тогда цена покажется не такой уж и большой за всё это добро. Плюс модуль идёт сразу с ресивером!
И помните, что даже если у вас будет контроллер и модули, вы не сможете включить его, пока не обзаведётесь батарейками, подходящими к контроллеру. В любом случае, найдите контроллер, который вам подходит, и тогда вы определитесь с подходящими батарейками.
Совет: если вы новичок, то обратитесь за помощью в местные хобби-магазины или найдите группы энтузиастов-радиолюбителей, потому что этот шаг — не просто шутка и вам нужно будет выложить существенную сумму денег.
Шаг 14: Проверка




Сначала включите бота, затем включите модуль передатчика, после этого модуль приёмника должен показать успешную привязку, мигая светодиодом.
Гид для новичков по FPV
Часть, установленная на боте называется FPV-передатчиком и камерой, а то, что у вас в руках, называется FPV-приёмником. Приёмник соединяется с любым экраном — будь то LCD, TV, TFT и т.д. Всё, что нужно сделать, так это вставить в него батарейки или подключить к источнику питания. Включите его, затем при необходимости поменяйте канал на приёмнике. После этого вы должны увидеть на экране то, что видит ваш бот.
Дальность сигнала FPV
В проекте использовался недорогой модуль, способный работать на расстоянии до 1.5 — 2 км, но это относится к использованию девайса на открытом пространстве, если вы хотите получить сигнал большей силы, то купите передатчик большей мощности, например 1000mW. Примите на заметку, что мой передатчик имеет мощность всего в 200mW и он был самым дешевым, который я смог найти.
Улучшение антенны
Замены антенны на антенну типа клевер увеличит дальность и силу сигнала
Шаг 15: Почти готово!



Остался лишь последний шаг — получить удовольствие от управления вашим новым танком-шпионом с камерой!





